TUDOMÁNY ÉS KATONAI BIZTONSÁG 1/2007, 28-33.
UDC 621.396.96
ŐKET. ANOSHKIN,
A Tudományos Kutatóintézet osztályvezetője
A Fehérorosz Köztársaság fegyveres erői,
A műszaki tudományok kandidátusa, tudományos főmunkatárs
Megadják a felépítési alapelveket, és értékelik a fejlett többállású légvédelmi radarrendszerek képességeit, amelyek lehetővé teszik az Egyesült Államok és szövetségesei fegyveres erői számára, hogy minőségileg új feladatokat oldjanak meg a rejtett megfigyelés és légtérellenőrzés terén.
A légi és interferencia-helyzettel kapcsolatos radarinformációk mennyiségére és minőségére vonatkozó követelmények folyamatos növekedése, az információs vagyon magas szintű biztonságának biztosítása az ellenséges elektronikus hadviselés hatásaival szemben arra készteti a külföldi katonai szakembereket, hogy ne csak új technikai megoldásokat keressenek a különféle rendszerek létrehozásában. radarállomások (RLS) alkatrészei, amelyek a légvédelmi rendszerek fő információs érzékelői, a légiforgalmi irányítás stb., hanem új, nem hagyományos területek fejlesztésére is ezen a területen a katonai felszerelések fejlesztése és létrehozása.
Az egyik ilyen ígéretes terület a többpozíciós radar. Az Egyesült Államok és számos NATO-ország (Nagy-Britannia, Franciaország, Németország) által ezen a területen végzett kutatás-fejlesztés célja a különböző célú radarberendezések és -rendszerek információtartalmának, zajtűrésének és túlélési képességének javítása. bistatikus és többpozíciós működési módok munkájuk során. Ezenkívül megbízhatóan figyeli az alacsonyan megfigyelhető légi célpontokat (AT-k), beleértve a lopakodó technológiával gyártott cirkáló rakétákat és repülőgépeket, amelyek elektronikus és az ellenség általi tűzoltás körülményei között működnek, valamint az alatta lévő felszínről és a helyi visszaverődésekről. tételeket. A többpozíciós radarrendszeren (MPRS) olyan adó- és vételi pontok összességét kell érteni, amelyek biztosítják a szükséges paraméterekkel rendelkező radarmező létrehozását. Az MPRS alapja (mint különálló cellái) a bisztatikus radarok, amelyek egy adó-vevő részeként helyezkednek el egymástól térben. Az adók kikapcsolt állapotában egy ilyen rendszer a vételi pontok közötti megfelelő kommunikációs vonalak jelenlétében passzív üzemmódban tud működni, meghatározva az elektromágneses hullámokat kibocsátó objektumok koordinátáit.
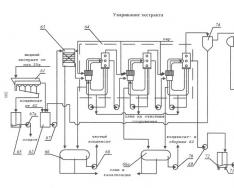
Az ilyen rendszerek harci körülmények közötti működésének fokozott titkosságának biztosítása érdekében a felépítésük különféle alapelveit figyelembe veszik: földi, légi, űrbeli és vegyes bázisok, amelyek szabványos radarok szondázó sugárzását használják, az ellenség aktív zavarói, valamint rádió mérnöki rendszerek (1. ábra), nem hagyományos radarokhoz (televízió- és rádióadók, különféle rendszerekés kommunikációs eszközök stb.). Ebben az irányban a legintenzívebb munkát az Egyesült Államokban végzik.
A televízió, a rádiós műsorszóró adóállomások (RTPS), a mobiltelefon-bázisállomások stb. megvilágítási zónái által alkotott lefedettségi térrel egybeeső radartérrendszer annak a ténynek köszönhető, hogy ezek antennatornyai magasak. elérheti az 50 ... 250 m-t, és az általuk kialakított mindenirányú megvilágítási zóna a föld felszínéhez nyomódik. A látótávolság képletével végzett legegyszerűbb újraszámítás azt mutatja, hogy a rendkívül alacsony magasságban repülő repülőgépek 50-80 km távolságból az ilyen adók megvilágítási mezejébe esnek.
A kombinált (monosztatikus) radaroktól eltérően az MPRS-célpontok észlelési zónája a radaros megfigyelés energiapotenciálján és körülményein túl nagymértékben függ felépítésük geometriájától, az adó- és vevőpontok számától és egymáshoz viszonyított helyzetétől. A „maximális érzékelési tartomány” fogalma itt egy olyan érték, amelyet nem lehet egyértelműen meghatározni az energiapotenciál alapján, mint a kombinált radarok esetében. Az MPRS egységcellájaként működő bisztatikus radar EC maximális érzékelési tartományát a Cassini ovális alakja határozza meg (állandó jel-zaj arány vonalai), amely megfelel az izodalitási görbék vagy vonalak családjának. állandó össztartományok (ellipszisek), amelyek meghatározzák a célpont helyzetét az oválison (2. ábra) a kifejezésnek megfelelően

A bistatikus radar maximális hatótávolságának meghatározására szolgáló radaregyenlet a következő

ahol rl,r2 - az adó és a cél, valamint a cél és a vevő közötti távolságok;
Pt- adóteljesítmény, W;
G t, GT- az adó- és vevőantennák erősítését;
Pmin - a vevőkészülék érzékenységének korlátozása;
k- Boltzmann-állandó;
v1, v2 - veszteségi együtthatók a rádióhullámok terjedése során az adótól a célpontig és a céltól a vevőig terjedő úton.
Az MPRS észlelési zónájának területe, amely egy adó- és több vevőpontból áll (vagy fordítva), jelentősen meghaladhatja egy egyenértékű kombinált radar észlelési zónájának területét.
Meg kell jegyezni, hogy az effektív szórási terület (ESR) értéke egy bisztatikus radarban ugyanarra a célpontra eltér az egypozíciós radarban mért RCS-től. Amikor megközelíti az alapvonalat (adó-vevő vonal) L az RCS meredek növekedésének hatása van (3. ábra), és ez utóbbi maximális értéke akkor figyelhető meg, ha a cél az alapvonalon van, és a képlet határozza meg
ahol DE - az objektum keresztmetszeti területe, merőleges a rádióhullámok terjedési irányára, m;
λ - hullámhossz, m.


Ennek az effektusnak a használata lehetővé teszi az alacsony profilú célpontok hatékonyabb észlelését, beleértve azokat is, amelyek a Stealth technológiával készültek. A többpozíciós radarrendszer kialakításának geometriájának különböző lehetőségei alapján valósítható meg mobil és helyhez kötött vételi pontok felhasználásával.
Az MPRS koncepcióját az Egyesült Államokban az 1950-es évek eleje óta dolgozták ki abból a célból, hogy különféle problémák megoldására, elsősorban az űrhajózás szabályozására használják fel őket. Az elvégzett munka főként elméleti, esetenként kísérleti jellegű volt. A többpozíciós radarrendszerek iránti érdeklődés az 1990-es évek végén ismét megnyilvánult, amikor megjelentek a nagy teljesítményű számítógépek és komplex jelfeldolgozó eszközök (radar, zavaró, rádió- és televízióadó állomások, mobil rádiójelek stb.), amelyek képesek nagy mennyiségek feldolgozására. a radarinformációkat az ilyen rendszerek elfogadható pontossági jellemzőinek elérése érdekében. Ezen túlmenően a GPS (Global Position System) űrrádió-navigációs rendszer megjelenése lehetővé teszi az MPRS elemek pontos topográfiai helymeghatározását és szoros időszinkronizálását, ami az ilyen rendszerekben a korrelációs jelfeldolgozás elengedhetetlen feltétele. A televízió (TV) és a frekvenciamodulált (FM) műsorszóró adóállomások által kibocsátott jelek radarjellemzői a cellás GSM kommunikáció rádiótelefon-állomásaival az 1. táblázatban láthatók.
A rádiójelek fő jellemzője radarrendszerekben való felhasználásuk szempontjából a bizonytalansági függvény (idő-frekvencia mismatch függvény vagy ún. "bizonytalansági test"), amely a felbontást a késleltetési idő (tartomány) tekintetében határozza meg. és Doppler-frekvencia (radiális sebesség). Általában a következő kifejezés írja le

ábrán A 4-5. ábrák a televíziós kép- és hangjelek, a VHF FM rádiójelek és a digitális szélessávú audio műsorszórási jelek bizonytalansági függvényeit mutatják be.
A fenti függőségek elemzéséből az következik, hogy a TV képjel bizonytalansági függvénye többcsúcsos jellegű, a keret és a vonal periodicitása miatt. A TV-jel folyamatos jellege lehetővé teszi a visszhangjelek nagy pontosságú frekvenciaválasztását, azonban a benne lévő képkocka-periodikus jelenléte 50 Hz után zavaró komponensek megjelenéséhez vezet a mismatch funkciójában. Az átvitt TV-kép átlagos fényerejének változása az átlagos sugárzási teljesítmény változásához, valamint az idő-frekvencia eltérési funkció fő- és oldalcsúcsai szintjének megváltozásához vezet. A TV hangjelek és a frekvenciamodulált VHF műsorszóró jelek fontos előnye a bizonytalanságtestek egycsúcsos jellege, amely megkönnyíti a visszhangjelek felbontását mind a késleltetési idő, mind a Doppler-frekvencia tekintetében. A spektrum szélessége feletti nonstacionaritásuk azonban erősen befolyásolja a bizonytalansági függvények központi csúcsának alakját és szélességét.
Az ilyen hagyományos értelemben vett jelek nem radarproblémák megoldására szolgálnak, mivel nem biztosítják a szükséges felbontást és pontosságot a célpontok koordinátáinak meghatározásában. A különféle eszközökkel kibocsátott, a számítógépközpontról visszaverődő és egyidejűleg több vételi ponton vett jelek közös valós idejű feldolgozása azonban lehetővé teszi a rendszer egészének szükséges pontossági jellemzőinek biztosítását. Ennek érdekében a tervek szerint új adaptív algoritmusokat alkalmaznak a radarinformációk digitális feldolgozására, valamint új generációs nagy teljesítményű számítástechnikai eszközöket.
A külső célmegvilágítási adókkal rendelkező MPRS jellemzője az erős közvetlen (áthatoló) adójelek jelenléte, amelyek szintje 40-90 dB-lel magasabb lehet, mint a céltárgyakról visszaverődő jelek szintje. Az érzékelési zóna kiterjesztése érdekében a behatoló adójelek, valamint az alatta lévő felszínről és a lokális tárgyakról visszaverődő visszaverődések zavaró hatásának csökkentése érdekében speciális intézkedésekre van szükség: zavaró jelek térbeli elutasítása, automatikus kompenzációs módszerek frekvencia-szelektív funkcióval. visszacsatolás magas és közepes frekvenciákon, elnyomás videofrekvencián stb.


Annak ellenére, hogy ez az irányú munka meglehetősen hosszú ideje folyik, csak a közelmúltban, a viszonylag olcsó, rendkívül nagy sebességű digitális processzorok megjelenése után, amelyek nagy mennyiségű információ feldolgozását teszik lehetővé, először volt valódi lehetőség a modern taktikai és technikai követelményeknek megfelelő kísérleti minták létrehozására.
Az elmúlt tizenöt év során az amerikai Lockheed Martin szakemberei egy ígéretes háromkoordinátás radarrendszert fejlesztettek ki a légi célpontok észlelésére és követésére többpozíciós konstrukciós elven alapuló, Silent Sentry néven.
Alapvetően új képességekkel rendelkezik a légi helyzet titkos megfigyelésére. A rendszer nem rendelkezik saját adóeszközzel, ami lehetővé teszi a passzív üzemmódban történő munkát, és nem teszi lehetővé az ellenség számára, hogy elektronikus hírszerzés segítségével meghatározza elemeinek elhelyezkedését. A Silent Sentry MPRS rejtett használatát az is megkönnyíti, hogy nincsenek forgó elemek és antennák, amelyek mechanikusan letapogatják az antennamintázatot a vételi pontjain. A szondázási jelek képzését és a célpontok megvilágítását biztosító fő források az amplitúdó- és frekvenciamodulált folyamatos jelek, amelyeket az ultrarövidhullámú adóállomások televíziós és rádiós műsorszórása bocsátanak ki, valamint a telephelyen található egyéb rádióberendezések jeleit. a rendszer lefedettségi területe, beleértve a légvédelmi és irányító radarokat, a légiforgalmat, a rádiójeladókat, a navigációs eszközöket, a kommunikációt stb. A Silent Sentry rendszer harci használatának elvei a 2. 6.
A fejlesztők szerint a rendszer lehetővé teszi nagyszámú AT egyidejű kísérését, amelyek számának csak a radar információfeldolgozó eszközök képességei szabnak határt. Ugyanakkor a Silent Sentry rendszer áteresztőképességét (a hagyományos radarberendezésekhez képest, amelyekben ez a mutató nagymértékben függ a radarantennarendszer és a jelfeldolgozó eszközök paramétereitől) nem korlátozzák az antennarendszerek és a vétel paraméterei. eszközöket. Ezenkívül a hagyományos radarokhoz képest, amelyek akár 40-50 km-es érzékelési tartományt biztosítanak az alacsonyan repülő célpontok számára, a Silent Sentry rendszer lehetővé teszi azok észlelését és nyomon követését akár 220 km-es távolságból is a magasabb jelteljesítménynek köszönhetően. televíziós és rádiós műsorszóró adók által kibocsátott állomások (több tíz kilowatt folyamatos üzemmódban), valamint antennaberendezéseiket speciális tornyokra (300 m-ig vagy annál magasabbra) és természetes magasságokra (dombok és hegyek) helyezve a lehető legnagyobb zónák biztosítása érdekében a televízió- és rádióműsorok megbízható vétele. Sugárzási mintájukat a föld felszínére nyomják, ami egyben javítja a rendszer képességét az alacsonyan repülő célpontok észlelésére.
A négy azonos típusú számítási egységgel (egyenként 0,5X0,5X0,5 m méretű) és egy antennarendszerrel (9X2,5 m méretű) konténerből álló rendszer mobil vevőmoduljának első kísérleti mintája. 1998 végén jött létre. Tömeggyártásuk esetén a rendszer egy vevőmoduljának költsége a felhasznált eszközök összetételétől függően 3-5 millió dollár.
A Silent Sentry rendszer vevőmoduljának stacionárius változata is elkészült, melynek jellemzőit a táblázat tartalmazza. 2. A mobil verziónál nagyobb fázisú antennát (PAA), valamint olyan számítástechnikai eszközöket használ, amelyek kétszer akkora teljesítményt nyújtanak, mint a mobil verzió. Az antennarendszert az épület oldalfelületére szerelték fel, melynek lapos fényszórója a nemzetközi repülőtér felé irányul. J.Washington Baltimore-ban (kb. 50 km-re az adóponttól).
A Silent Sentry rendszer álló típusú különálló vevőmoduljának összetétele a következőket tartalmazza:
antennarendszer a célcsatorna fázissorával (lineáris vagy lapos), amely biztosítja a célpontokról visszavert jelek vételét;


„Referencia” csatornák antennái, amelyek közvetlen (referencia) jelek vételét biztosítják célmegvilágítási adóktól;
egy nagy dinamikatartománnyal rendelkező vevőkészüléket és rendszereket a célmegvilágítási adók zavaró jeleinek elnyomására;
radarjelek analóg-digitális átalakítója;
a Silicon Graphics által gyártott nagy teljesítményű digitális processzor radarinformációk feldolgozására, amely legalább 200 légi cél valós idejű adatkimenetét biztosítja;
légi helyzetet megjelenítő eszközök;
processzor a háttér-cél helyzet elemzésére, amely optimalizálja bizonyos típusú szondázó sugárzási jelek és a rendszer lefedettségi területén elhelyezett célmegvilágítási adók kiválasztását minden egyes működési pillanatban annak érdekében, hogy elérje a maximális jel-zaj viszonyt a radar információfeldolgozó eszköz kimenete;

az információk nyilvántartásának, rögzítésének és tárolásának eszközei;
Képzési és szimulációs berendezések;
az autonóm áramellátás eszközei.
A vételi fázisú tömb számos alrendszert tartalmaz, amelyeket a kereskedelmi forgalomban kapható antennarendszerek meglévő típusai alapján fejlesztettek ki különféle tartományokra és célokra. Kísérleti mintákként hagyományos vevő televíziós antennaeszközök is szerepelnek benne. Egy PAA vevő kendő az azimut szektorban 105 fokig, magassági szektorban 50 fokig képes látómezőt biztosítani, a célpontokról visszaverődő jelek leghatékonyabb vételi szintjét pedig az azimut szektor felfelé biztosítja. 60 fokig. A körkörös nézetterület azimutban való átfedésének biztosítására több PAR vászon is használható.
A Silent Sentry rendszer vevőmoduljának stacionárius és mobil változatának antennarendszereinek, vevőkészülékének és helyzetkijelző készülékének képernyőjét a 7. ábra mutatja. A rendszert valós körülmények között tesztelték 1999 márciusában ( Fort Stewart, Georgia). Ez lehetővé tette a megfigyelést (észlelés, követés, térbeli koordináták, sebesség és gyorsulás meghatározása) passzív módban különböző aerodinamikai és ballisztikus célpontok számára.
A Silent Sentry rendszer létrehozásával kapcsolatos további munka fő feladata jelenleg képességeinek javítása, különösen a célfelismerő módba való bevezetése. Ez a probléma részben megoldódik a már létrehozott mintákban, de nem valós időben. Emellett kidolgozás alatt van a rendszer olyan verziója is, amelyben a tervek szerint a korai figyelmeztető és irányító repülőgépek légi radarjait célmegvilágítási adóként használják majd.
Az Egyesült Királyságban az 1980-as évek vége óta dolgoznak az erre a célra szolgáló többpozíciós radarrendszerek terén. Különféle kísérleti modelleket fejlesztettek ki és telepítettek bisztatikus radarrendszerekre, amelyek vevőmoduljait a londoni Heathrow repülőtér területén telepítették (8. ábra). Célmegvilágítási adóként rendszeres rádió- és televízióadóállomásokat, valamint légiforgalmi irányító radarokat használtak. Ezen túlmenően kísérleti modelleket fejlesztettek ki előre szóródó Doppler-radarokra, amelyek a célpontok RCS-jének növekedésének hatását használják fel, amikor közelednek egy televíziós megvilágítású bisztatikus rendszer alapvonalához. A norvég védelmi minisztérium kutatóintézetében kutatást végeztek az MPRS létrehozásának területén rádió- és televízióadóállomások felhasználásával a CC-nek való kitettség forrásaként, amint arról a vezető norvég intézmények és fejlesztők ülésén beszámoltak az ígéretes létrehozási projektekről. és új rádióelektronikai katonai felszerelések és technológiák fejlesztése 2000 júniusában G.
A mobil cellás kommunikáció deciméteres hullámhossz-tartományú bázisállomásai a légteret szondázó jelek forrásaként is használhatók. Ebben az irányban a passzív radarrendszerek saját verziójának megalkotásán a német Siemens cég, a brit Roke Manor Research és a BAE Systems, valamint a francia ONERA űrügynökség szakemberei végzik el.
A CC helyének meghatározását több bázisállomás által kibocsátott jelek fáziskülönbségének kiszámításával tervezik, amelyek koordinátái nagy pontossággal ismertek. Ebben az esetben a fő technikai probléma az ilyen mérések néhány nanoszekundum alatti szinkronizálása. Ezt a Navstar űrrádió-navigációs rendszer létrehozása során kifejlesztett, rendkívül stabil időszabványok (űrhajókra szerelt atomórák) technológiáinak alkalmazásával kívánják megoldani.
Az ilyen rendszerek túlélőképessége magas, mivel működésük során nincs jele a mobiltelefon-bázisállomások radaradóként való használatának. Ha az ellenség valamilyen módon meg tudja állapítani ezt a tényt, kénytelen lesz megsemmisíteni a telefonhálózat összes adóját, ami a kiépítésük jelenlegi mértékét tekintve valószínűtlennek tűnik. Az ilyen radarrendszerek vevőkészülékeinek azonosítása és megsemmisítése technikai eszközökkel gyakorlatilag lehetetlen, mivel működésük során szabványos mobiltelefon-hálózat jeleit használják fel. A zavarók használata a fejlesztők szerint azért is hatástalannak bizonyul, mert a vizsgált MPRS-opciók működése során lehetséges olyan üzemmód, amelyben maguk a REB-eszközök további megvilágítási források. légi célok.
2003 októberében a Roke Manor Research bemutatta a Celldar passzív radarrendszer egy változatát (a Cellular phone radar rövidítése) a brit védelmi minisztérium vezetőségének a Salisbury Plain gyakorlótéren tartott katonai gyakorlatok során. A két hagyományos parabolaantennából, két mobiltelefonból ("cellaként" működő) és egy analóg-digitális átalakítóval ellátott PC-ből álló demonstrációs prototípus ára valamivel több mint 3 ezer dollár volt. Külföldi szakértők szerint. , bármely fejlett infrastruktúrájú mobiltelefonnal rendelkező ország katonai osztálya, amely képes hasonló létrehozására  nye radarrendszerek. Ebben az esetben a telefonhálózati adók üzemeltetőik tudta nélkül is használhatók. Lehetőség lesz a Celldar-hoz hasonló rendszerek képességeinek bővítésére segédeszközökkel, például akusztikus érzékelőkkel.
nye radarrendszerek. Ebben az esetben a telefonhálózati adók üzemeltetőik tudta nélkül is használhatók. Lehetőség lesz a Celldar-hoz hasonló rendszerek képességeinek bővítésére segédeszközökkel, például akusztikus érzékelőkkel.
Így a Silent Sentry vagy Celldar típusú többállású radarrendszerek létrehozása és alkalmazása lehetővé teszi az Egyesült Államok és szövetségesei fegyveres erői számára, hogy minőségileg új feladatokat oldjanak meg a légtér titkos megfigyelésével és ellenőrzésével a lehetséges fegyveres konfliktusok zónáiban. a világ bizonyos régióiban. Emellett bekapcsolódhatnak a légiforgalmi irányítás problémáinak megoldásába, a kábítószer-terjedés elleni küzdelembe stb.
Amint azt az elmúlt 15 év háborús tapasztalatai mutatják, a hagyományos légvédelmi rendszerek alacsony zajtűréssel és túléléssel rendelkeznek, elsősorban a nagy pontosságú fegyverek becsapódása miatt. Ezért az aktív radar hátrányait a lehető legnagyobb mértékben semlegesíteni kell további eszközökkel - a célpontok kis és rendkívül alacsony magasságban történő felderítésének passzív eszközeivel. A különféle rádióberendezések külső sugárzását használó többpozíciós radarrendszerek fejlesztése meglehetősen aktívan zajlott a Szovjetunióban, különösen fennállásának utolsó éveiben. Jelenleg számos FÁK-országban folytatódnak az MPRS létrehozásával kapcsolatos elméleti és kísérleti tanulmányok. Meg kell jegyezni, hogy a radar ezen a területén hasonló munkát hazai szakemberek végeznek. Különösen létrehoztak és sikeresen teszteltek egy kísérleti bisztatikus „Pole” radart, ahol rádió- és televízióadóállomásokat használnak célmegvilágítási adóként.
IRODALOM
1. Jane's Defense Equipment (A világ országainak fegyverzeteinek elektronikus könyvtára), 2006 - 2007.
2. Peter B. Davenport. Multistatikus passzív radar használata UFO"S valós idejű észlelésére a Föld-közeli környezetben. - Copyright 2004. - National UFO Reporting Center, Seattle, Washington.
3. H. D. Griffiths. Bistatikus és multisztatikus radar. - University College London, Dept. Elektronikai és elektrotechnika. Torrington Place, London WC1E 7JE, Egyesült Királyság.
4 Jonathan Bamak, Dr. Gregory Baker, Ann Marie Cunningham, Lorraine Martin. Silent Sentry™ passzív megfigyelés // Aviation Week&Space Technology. - 1999. június 7. - P.12.
5. Ritka hozzáférés: http://www.roke.co/. uk/sensors/stealth/celldar.asp.
6. Karshakevich D. A "Field" radar jelensége // Hadsereg. - 2005 - 1. sz. - S. 32 - 33.
A hozzászóláshoz regisztrálnia kell az oldalon.
Az integrált légvédelmi-rakétavédelmi rendszer a hadműveleti területen biztosítja az erők és eszközök integrált alkalmazását légi és ballisztikus célpontok ellen a repülési pálya bármely részén.
A közös légvédelmi-rakétavédelmi rendszer hadműveleti helyszíneken történő telepítése a légvédelmi rendszerek alapján történik, új és korszerűsített eszközök összetételébe való beépítésével, valamint "hálózatközpontú építési és hadműveleti felhasználási elvek" bevezetésével. (hálózatközpontú architektúra és működés).
Az érzékelők, tűzfegyverek, központok és parancsnoki állomások földi, tengeri, légi és űrhajókon alapulnak. Különböző típusú repülőgépekhez tartozhatnak ugyanabban a zónában.
Az integrációs technológiák közé tartozik a légi helyzet egységes képének kialakítása, a légi és földi célpontok harci azonosítása, a harcirányítás és a fegyverirányítási rendszerek automatizálása. Előírja a meglévő légvédelmi rendszerek irányítási struktúrájának lehető legteljesebb kihasználását, a kommunikációs és adatátviteli rendszerek valós idejű interoperabilitását, valamint a nyílt architektúra elvein alapuló közös adatcsere szabványok elfogadását.
Az egységes légi helyzetkép kialakítását a fizikai elvekben heterogén szenzorok alkalmazása és az érzékelők egységes információs hálózatba integrált elhelyezése segíti elő. A földi információ vezető szerepe mindazonáltal azt jelenti, hogy a horizonton túli, a horizonton túli és a több pozícióra épülnek. légvédelmi radar.
A NATO ORSZÁGOK RADAR LÉVVÉDELMÉNEK FŐ TÍPUSAI ÉS MŰSZAKI JELLEMZŐI
A földi bázisú, horizonton túli légvédelmi radarok egy információs rendszer részeként megoldják az összes osztályú célpontok észlelésének problémáját, beleértve a ballisztikus rakétákat is, összetett zavaró és célkörnyezetben, amikor ellenséges fegyvereknek vannak kitéve. Ezeket a radarokat modernizálják és integrált megközelítések alapján hozzák létre, figyelembe véve a „hatékonyság / költség” kritériumot.
A radarlétesítmények korszerűsítése a korszerű radarlétesítmények létrehozását célzó, folyamatban lévő kutatások részeként kifejlesztett radar alrendszerek elemeinek bevezetése alapján valósul meg. Ez annak a ténynek köszönhető, hogy egy teljesen új állomás költsége magasabb, mint a meglévő radarok korszerűsítésének költsége, és eléri a több millió dollárt. Jelenleg a külföldi szolgálatban lévő légvédelmi radarok túlnyomó többsége centiméter és deciméter tartományban található. Az ilyen állomások reprezentatív példái a radarok: AN / FPS-117, AR 327, TRS 2215 / TRS 2230, AN / MPQ-64, GIRAFFE AMB, M3R, GM 400.
AN / FPS-117 radar, amelyet a Lockheed Martin tervezett és gyártott. 1-2 GHz-es frekvenciatartományt használ, egy teljesen szilárdtest rendszer, amely a korai figyelmeztetés, a célpontok helymeghatározása és azonosítása problémáinak megoldására, valamint az ATC rendszerben való használatra készült. Az állomás lehetőséget biztosít a működési módok adaptálására a kialakuló interferencia-helyzet függvényében.
A radarállomáson használt számítástechnikai eszközök lehetővé teszik a radar alrendszerek állapotának folyamatos figyelemmel kísérését. Határozza meg és jelenítse meg a hiba helyét a kezelő munkahelyének monitorán. Továbbra is folyik a munka az AN / FPS-117 radart alkotó alrendszerek fejlesztésén. amely lehetővé teszi az állomás használatát ballisztikus célpontok észlelésére, becsapódási helyük meghatározására és célmegjelölés kiadására az érdeklődő fogyasztók számára. Az állomás fő feladata ugyanakkor továbbra is a légi célpontok felderítése és követése.
Az AR 327, amelyet az Egyesült Államok és Nagy-Britannia szakemberei az AR 325 állomás alapján fejlesztettek ki, képes ellátni az alacsony szintű automatizálási eszközök komplexumának funkcióit (ha ezenkívül egy kabinnal van felszerelve további munkákkal). Egy minta becsült költsége 9,4-14 millió dollár. Az antennarendszer, amely fényszórók formájában készült, fázisszkennelést biztosít magasságban. Az állomás digitális jelfeldolgozást használ. A radart és alrendszereit a Windows operációs rendszer vezérli. Az állomást az európai NATO-országok automatizált vezérlőrendszereiben használják. Emellett a radar működését lehetővé tevő interfészeket is korszerűsítik.
Az USA és Nagy-Britannia szakemberei által az AR 325 állomás alapján kifejlesztett AR 327 alacsony szintű automatizálási eszközök komplexumának funkcióit képes ellátni (ha további munkákat tartalmazó fülkével van felszerelve), a becsült költség egy minta 9,4-14 millió dollár. Az antennarendszer, amely fényszórók formájában készült, fázisszkennelést biztosít magasságban. Az állomás digitális jelfeldolgozást használ. A radart és alrendszereit a Windows operációs rendszer vezérli. Az állomást az európai NATO-országok automatizált vezérlőrendszereiben használják. Emellett az interfész eszközöket is korszerűsítik, hogy biztosítsák a radar működését a számítástechnikai eszközök teljesítményének további növelésével.
A radar jellemzője az SDC digitális rendszerének és az aktív interferenciavédelmi rendszernek a használata, amely széles frekvenciatartományban képes adaptívan átkonfigurálni az állomás működési frekvenciáját. Létezik egy „impulzusról impulzusra” frekvenciahangolási mód is, és javult a magasság meghatározásának pontossága alacsony célmagassági szögeknél. A tervek szerint továbbfejlesztik az adó-vevő alrendszert és a vett jelek koherens feldolgozására szolgáló berendezést a hatótávolság növelése és a légi célpontok észlelésének pontossági mutatóinak javítása érdekében.
Az AT észlelésére, azonosítására és nyomon követésére tervezett francia háromkoordinátás radarok TRS 2215 és 2230 fázissorral, a SATRAPE állomás alapján fejlesztették ki mobil és hordozható változatban. Ugyanolyan adó-vevő rendszerrel, adatfeldolgozási lehetőséggel és az antennarendszer alkatrészeivel rendelkeznek, különbségük az antennatömbök méretében van. Az ilyen egységesítés lehetővé teszi az állomások logisztikájának rugalmasságának és szolgáltatásaik minőségének növelését.
Az AN / TPQ-36A állomás alapján létrehozott, centiméteres tartományban működő AN / MPQ-64 szállítható radar. Úgy tervezték, hogy észlelje, nyomon kövesse, mérje a légi objektumok koordinátáit, és adjon ki célkijelölést az elfogó rendszereknek. Az állomást az amerikai fegyveres erők mobil egységei használják a légvédelem megszervezésében. A radar képes együttműködni más érzékelő radarokkal és rövid hatótávolságú légvédelmi információs rendszerekkel.
|
|

A GIRAFFE AMB mobil radarállomást úgy tervezték, hogy megoldja a célpontok észlelésével, koordinátáinak meghatározásával és követésével kapcsolatos problémákat. Ez a radar új technikai megoldásokat alkalmaz a jelfeldolgozó rendszerben. A korszerűsítés eredményeként az irányító alrendszer lehetővé teszi a lebegő üzemmódban lévő helikopterek automatikus észlelését és a fenyegetettség mértékének felmérését, valamint a harcirányítási funkciók automatizálását.
Az M3R mobil moduláris multifunkcionális radart a francia Thales cég fejlesztette ki az azonos nevű projekt részeként. Ez egy új generációs állomás, amelyet a kombinált GTVO-PRO rendszerben való használatra terveztek, a Master állomáscsalád alapján, amely modern paraméterekkel a legversenyképesebb a nagy hatótávolságú mobil érzékelő radarok között. Ez egy többfunkciós, három koordinátás radar, amely 10 cm-es tartományban működik. Az állomás az "intelligens radarvezérlés" (Intelligent Radar Management) technológiáját használja, amely különféle üzemmódokban biztosítja a hullámforma, az ismétlési periódus stb.
A Thales által kifejlesztett GM 400 (Ground Master 400) légvédelmi radar az integrált légvédelmi-rakétavédelmi rendszerben való használatra készült. Szintén a Master állomáscsalád alapján készül, és egy többfunkciós háromkoordinátás radar, amely a 2,9-3,3 GHz-es sávban működik.
A vizsgált radarban számos olyan ígéretes konstrukciós koncepciót sikerült megvalósítani, mint a „teljesen digitális radar” (digitális radar) és a „teljesen környezetbarát radar” (zöld radar).
|
|

Az állomás jellemzői: az antennamintázat digitális vezérlése; hosszú célérzékelési tartomány, beleértve az NLC-t és a BR-t; a radar alrendszerek működésének távoli vezérlése az üzemeltetők távoli automatizált munkaállomásairól.
A horizonton túli állomásokkal ellentétben a horizonton túli radarok hosszabb figyelmeztetési időt biztosítanak a légi vagy ballisztikus célpontok számára, és a rádióhullámok frekvenciatartománybeli terjedésének jellemzői miatt jelentős távolságokra tolják el a légi célpontok észlelési vonalát. (2-30 MHz) a horizonton túli létesítményekben használatos, és lehetővé teszik az észlelt célpontok effektív szórófelületének (ESR) jelentős növelését, és ennek eredményeként az észlelési tartomány növelését.
A horizonton túli radarok, különösen a ROTHR sugárzó sugárzási mintázatának kialakításának sajátossága lehetővé teszi a látóterület többrétegű (teljes magasságú) lefedését a kritikus területeken, ami releváns a probléma megoldásában. problémák az Egyesült Államok nemzeti területe biztonságának és védelmének biztosításával, valamint a tengeri és légi célpontok elleni védelemmel, beleértve a cirkáló rakétákat is. A horizonton túli radarok reprezentatív példái: AN / TPS-7I (USA) és Nostradamus (Franciaország).
Az Egyesült Államok kifejlesztette és folyamatosan fejleszti az AN / TPS-71 ZG radart, amelyet az alacsonyan repülő célpontok észlelésére terveztek. Az állomás megkülönböztető jellemzője a földkerekség bármely régiójába történő átvitel lehetősége és viszonylag gyors (akár 10-14 napos) telepítése a korábban előkészített pozíciókban. Ehhez az állomás berendezéseit speciális tartályokba szerelik.
A horizonton túli radar információi bekerülnek a haditengerészet célkijelölő rendszerébe, valamint más típusú repülőgépekbe. A cirkálórakéta-hordozók felderítése érdekében az Egyesült Államokkal szomszédos területeken, Virginia, Alaszka és Texas államokban található állomásokon kívül a tervek szerint egy korszerűsített horizonton túli radart telepítenek Észak-Dakota államban. (vagy Montana) szabályozza a légteret Mexikó és a Csendes-óceán környező területei felett. Döntés született új állomások telepítéséről a cirkálórakéta-hordozók észlelésére a Karib-térségben, Közép- és Dél-Amerika felett. Az első ilyen állomást Puerto Ricóban telepítik. Az átviteli pontot kb. Vieques, recepció - délnyugati részén kb. Puerto Rico.
Franciaországban a Nostradamus projekt keretében befejeződött egy ferde-dugattyús szondás radar kifejlesztése, amely 700-3000 km távolságból érzékeli a kis célpontokat. Az állomás fontos megkülönböztető jellemzői: a légi célpontok egyidejű észlelése 360 fokon belül azimutban, valamint monosztatikus építési módszer alkalmazása a hagyományos bisztatikus helyett. Az állomás Párizstól 100 km-re nyugatra található. A „Nostradamus” horizonton túli radar elemeinek űr- és légiplatformokon való felhasználásának lehetőségét fontolgatják a támadással kapcsolatos korai figyelmeztetés problémáinak megoldására légitámadással és az elfogó fegyverek hatékony irányításával.
Külföldi szakemberek a horizonton túli felszíni hullám radarokat (OH RLS) viszonylag olcsó eszköznek tartják az államok területének levegőjének és felszíni terének hatékony ellenőrzésére.
Az ilyen radaroktól kapott információk lehetővé teszik a megfelelő döntések meghozatalához szükséges figyelmeztetési idő növelését.
A horizonton túli és a horizonton túli felszíni hullámradarok légi és felszíni objektumok észlelésére vonatkozó képességeinek összehasonlító elemzése azt mutatja, hogy a földi ZG radarok észlelés szempontjából lényegesen felülmúlják a hagyományos földi radarokat. hatótávolság és képesség mind az alacsonyan megfigyelhető, mind az alacsonyan repülő célpontok, valamint a különböző vízkiszorítású felszíni hajók követésére. Ugyanakkor a levegőben lévő tárgyak nagy és közepes magasságban történő észlelésének képessége kissé csökken, ami nem befolyásolja a horizonton túli radarberendezések hatékonyságát. Ezenkívül a felszínfürdős MG radar beszerzésének és üzemeltetésének költségei viszonylag alacsonyak és arányosak a hatékonyságukkal.
A külföldön alkalmazott felszíni hullámradarok fő modelljei az SWR-503 állomások (az SWR-603 továbbfejlesztett változata) és az OVERSEER.
Az SWR-503 felszíni hullámradart a Raytheon kanadai szervezete fejlesztette ki a Kanadai Védelmi Minisztérium követelményeinek megfelelően. A radar az ország keleti partjával szomszédos óceáni területek feletti légtér és felszíni tér megfigyelésére, a kizárólagos gazdasági övezet határain belüli felszíni és légi célpontok észlelésére és követésére szolgál.
Az SWR-503 állomás Jéghegyek észlelésére, a környezet figyelésére, bajba jutott hajók és repülőgépek felkutatására is használható. Két ilyen típusú állomás és egy operatív irányítóközpont már működik a légi és tengeri tér megfigyelésére az új-fundlandi régióban, amelynek part menti övezeteiben jelentős hal- és olajkészletek találhatók. Feltételezések szerint az állomás a repülőgépek légiforgalmának irányítására szolgál majd a teljes magassági tartományban, valamint a radarhorizont alatti célpontok megfigyelésére.
A tesztelés során a radar minden olyan célpontot észlelt és követett, amelyet más légvédelmi és partvédelmi rendszerek is megfigyeltek. Ezenkívül kísérleteket végeztek a tengerfelszín felett repülő rakéták észlelésének lehetőségének biztosítására, azonban a probléma hatékony és teljes körű megoldása érdekében a radar fejlesztői szerint ki kell bővíteni a működési tartományát 15-20 MHz. Külföldi szakértők szerint a hosszú tengerparttal rendelkező országok akár 370 km-es időközönként is telepíthetnek ilyen radarhálózatot, hogy biztosítsák a határaikon belüli légi és tengeri megfigyelési zóna teljes lefedését.
A szolgálatban lévő SWR-5G3 légvédelmi radar egy mintájának ára 8-10 millió dollár. Az állomás üzemeltetési és komplex karbantartási folyamatai évente mintegy 400 ezer dollárba kerülnek.
Az OVERSEER ZG radar a felszíni hullám állomások új családját képviseli, amelyet a Marconi fejlesztett ki, és polgári és katonai felhasználásra készült. A felszín feletti hullámterjedés hatását felhasználva az állomás minden osztályba tartozó légi és tengeri objektumot képes nagy távolságból és különböző magasságból érzékelni, amelyeket a hagyományos radar nem képes észlelni.
Az állomási alrendszerek számos technológiai fejlesztést ötvöznek, amelyek lehetővé teszik, hogy a gyors adatfrissítésekkel jobb információs képet kapjon a célpontokról a tenger és a légtér nagy területein.
Az OVERSEER felszíni hullámradar egy mintájának költsége egyállású változatban hozzávetőleg 6-8 millió dollár, az állomás üzemeltetése és átfogó karbantartása a megoldandó feladatoktól függően 300-400 ezer dollárra becsülhető. .
A jövő katonai konfliktusaiban a "hálózatközpontú műveletek" elveinek megvalósítása során külföldi szakértők szerint új módszerek alkalmazását teszi szükségessé az információs rendszerelemek kiépítésében, beleértve a többpozíciós (MP) és elosztott szenzorokon, ill. elemei, amelyek a NATO-n belüli integráció követelményeinek figyelembevételével a fejlett észlelőrendszerek, valamint a légvédelmi és rakétavédelmi irányítás információs infrastruktúrájának részét képezik.
A többállású radarrendszerek a fejlett légvédelmi és rakétavédelmi vezérlőrendszerek információs alrendszereinek legfontosabb összetevőjévé válhatnak, valamint hatékony eszközzé válhatnak a különböző osztályú UAV-k és a cirkáló rakéták észlelésének problémáinak megoldásában.
TÖBB HOSSZATÚ RADAR (MP RLS)
Külföldi szakértők szerint a NATO-országokban nagy figyelmet fordítanak a fejlett földi többpozíciós rendszerek létrehozására, amelyek egyedi képességekkel rendelkeznek a különféle légi célpontok (AT) észlelésére. Fontos helyet foglalnak el köztük a nagy hatótávolságú rendszerek és az "elosztott" rendszerek, amelyeket a "Silent Sentry-2", "Rias", CELLDAR stb. programok keretében hoztak létre. Az ilyen radarokat úgy tervezték, hogy a problémák megoldása során a vezérlőrendszer részeként működjenek. a CC detektálása minden magassági tartományban az elektronikus hadviselés alkalmazási körülményei között. A kapott adatokat a fejlett légvédelmi és rakétavédelmi rendszerek, a célpontok nagy hatótávolságú felderítése és követése, valamint ballisztikus rakéták kilövéseinek felderítése érdekében fogják felhasználni, ideértve a NATO-n belüli hasonló eszközökkel történő integrációt is.
MP radar "Silent Sentry-2". Külföldi sajtóértesülések szerint a NATO-országokban az 1970-es évek óta aktívan fejlesztenek radarokat, amelyek a televízió- vagy rádióadók sugárzásának célpontok megvilágítására való felhasználásának lehetőségén alapulnak. Egy ilyen rendszer egyik változata, amelyet az amerikai légierő és az amerikai hadsereg követelményeinek megfelelően hoztak létre, a Silent Sentry MP radar, amely fejlesztés után a Silent Sentry-2 nevet kapta.
Külföldi szakértők szerint a rendszer lehetővé teszi a repülőgépek, helikopterek, rakéták észlelését, a légi forgalom irányítását, a légtér irányítását a konfliktusövezetekben, figyelembe véve az Egyesült Államok és a NATO légvédelmi és rakétavédelmi rendszerei munkájának titkosságát ezekben a régiókban. A színházban meglévő TV- vagy rádióadók frekvenciájának megfelelő frekvenciatartományban működik.
A kísérleti vételi fázisú tömb (Baltimore-ban, az adótól 50 km-re található) sugárzási mintája a washingtoni nemzetközi repülőtér felé irányult, ahol a tesztelési folyamat során a célpontokat észlelték és követték. A radarvevő állomás mobil változatát is kifejlesztették.
A munka során az MP radar vételi és adási helyzetét szélessávú adatátviteli vonalakkal egyesítették, és a rendszer nagy teljesítményű feldolgozó berendezéseket tartalmaz. Külföldi sajtóértesülések szerint a Hubble teleszkóppal felszerelt MTKK STS 103 repülése során megerősítették a Silent Sentry-2 rendszer célfelderítő képességeit. A kísérlet során sikeresen észleltek célpontokat, amelyek nyomon követését fedélzeti optikai eszközökkel, köztük teleszkóppal is megkettőzték. Ezzel egy időben megerősítést nyert a Saileng Sentry-2 radar képessége több mint 80 AT észlelésére és követésére. A kísérletek során nyert adatokat egy többpozíciós STAR típusú rendszer létrehozásának további munkája során használták fel, amelyet alacsony pályán járó űrhajók követésére terveztek.
MP radar "Rias". Külföldi sajtóértesülések szerint számos NATO-ország szakemberei is sikeresen dolgoznak az MP radarok létrehozásának problémáján. A francia Thomson-CSF és Onera cégek, a légierő követelményeinek megfelelően, a Rias program keretében végezték el a megfelelő munkát. Beszámoltak arról, hogy a 2015 utáni időszakban egy ilyen rendszerrel nagy hatótávolságú célpontokat (beleértve a kis méretű és lopakodó technológiával készülteket), UAV-kat és cirkálórakétákat lehetett észlelni és követni.
Külföldi szakértők szerint a Rias rendszer lehetővé teszi a katonai és polgári légi járművek légi irányítási problémáinak megoldását. A "Rias" állomás több vételi helyről származó adatok korrelációs feldolgozásával rendelkező rendszer, amely 30-300 MHz frekvenciatartományban működik. Legfeljebb 25 elosztott adóból és vevőből áll, amelyek körirányú dipólantennákkal vannak felszerelve, amelyek hasonlóak a horizonton túli radarantennákhoz. A 15. árbocokon az adó- és vevőantennák több tíz méteres távolságban helyezkednek el koncentrikus körökben (400 m átmérőig). A "Rias" radar kísérleti modelljét kb. Levant (Toulontól 40 km-re) a tesztelés alatt lehetővé tette egy nagy magasságú cél (például repülőgép) észlelését 100 km-nél nagyobb távolságból.
A külföldi sajtó szerint ez az állomás a rendszerelemek redundanciája miatt magas szintű túlélést és zajvédelmet biztosít (az egyes adók vagy vevők meghibásodása nem befolyásolja az egész működésének hatékonyságát). Működése során több, egymástól független adatfeldolgozó berendezés készlet a földre, fedélzetre telepített vevőkkel repülőgép(nagy alappal rendelkező MP radarok kialakításakor). Mint arról beszámoltunk, a radar harci körülmények között történő használatra tervezett változata akár 100 adót és vevőt is tartalmaz majd, és megoldja a légvédelmi, rakétavédelmi és légiirányítási feladatokat.
MP CELLDAR radar. Külföldi sajtóértesülések szerint a NATO-országok (Nagy-Britannia, Németország stb.) szakemberei aktívan dolgoznak olyan új típusú többpozíciós rendszerek és eszközök létrehozásán, amelyek a mobilkommunikációs mobilhálózatok adóinak sugárzását használják fel. A kutatást a Roke Mainsr. "Siemens", "BAe Systems" és számos más a légierő és a szárazföldi erők érdekében a légvédelmi és rakétavédelmi feladatok megoldására szolgáló többpozíciós érzékelőrendszer egy változatának megalkotása részeként korrelációs feldolgozás segítségével több vételi pozícióból származó adatok. A többpozíciós rendszer a mobiltelefon-tornyokra szerelt adóantennák által generált sugárzást használja, amely célmegvilágítást biztosít. Fogadó eszközként speciális, a GSM 900, 1800 és 3G szabványok frekvenciasávjában működő berendezéseket használnak, amelyek az antenna alrendszerek adatait fázistömb formájában fogadják.
Külföldi sajtóértesülések szerint ennek a rendszernek a vevői a föld felszínén, mobil platformokon, repülőgépek fedélzetén helyezhetők el az AWACS rendszer és a szállító- és üzemanyag-feltöltés repülőgépek szerkezeti elemeibe integrálásával. A CELLDAR rendszer pontossági jellemzőinek és zajtűrésének javítása érdekében a vevőkészülékekkel együtt lehetőség van akusztikus érzékelők elhelyezésére ugyanazon a platformon. A rendszer hatékonyabbá tétele érdekében lehetőség van egyedi elemek UAV-ra és AWACS-ra történő felszerelésére és repülőgépek irányítására is.
Külföldi szakértők szerint a 2015 utáni időszakban az ilyen típusú MP radarokat széles körben tervezik alkalmazni a légvédelmi és rakétavédelmi érzékelő és irányító rendszerekben. Egy ilyen állomás biztosítja a mozgó földi célok, helikopterek, tengeralattjáró periszkópok, felszíni célok észlelését, felderítést a csatatéren, támogatást a különleges erők akcióihoz és tárgyak védelmét.
MP radar "Sötét". Külföldi sajtóértesülések szerint a "Thomson-CSF" francia cég kutatást és fejlesztést végzett a "Dark" program keretében légi célpontok észlelésére szolgáló rendszer létrehozására. A vezető fejlesztő, a Thomson-CSF szakemberei a légierő követelményeinek megfelelően a Dark vevő egy kísérleti mintáját tesztelték, álló változatban. Az állomás Palaiseauban volt, és megoldotta a párizsi Orly repülőtérről repülő repülőgépek észlelésének problémáját. A célmegvilágításhoz szükséges radarjeleket az Eiffel-toronyban (több mint 20 km-re a vevőkészüléktől) elhelyezett TV-adók, valamint a Párizstól 180 km-re található Bourges és Auxerre városok televíziós állomásai hozták létre. A fejlesztők szerint a légi célpontok koordinátáinak és mozgási sebességének mérési pontossága összemérhető az érzékelőradarével.
Külföldi sajtóértesülések szerint a cégvezetés tervei szerint a „Dark” rendszer fogadóberendezésének további fejlesztésén, a fogadóutak műszaki jellemzőinek javítását és a választási lehetőségeket figyelembe véve folytatják a munkát. a számítógép-komplexum hatékonyabb operációs rendszere. A fejlesztők szerint az egyik legmeggyőzőbb érv a rendszer mellett az alacsony költség, mivel létrehozása során a rádió- és TV-jelek vételére és feldolgozására jól ismert technológiákat használtak. A 2015 utáni időszakban végzett munka befejezése után egy ilyen MP radar hatékonyan megoldja az AT-k (beleértve a kis méretűeket és a Stealth technológiával készülteket), valamint az UAV-k és a KR-ek észlelésének és követésének problémáit nagy távolságon.
AASR radar. A külföldi sajtóértesülések szerint a svéd Saab Microwave Systems cég szakemberei bejelentették, hogy folyamatban van az AASR (Associative Aperture Synthesis Radar) többállású légvédelmi rendszer létrehozása, amely a lopakodó technológiával kifejlesztett repülőgépek észlelésére szolgál. Működési elve szerint egy ilyen radar hasonló a CELLDAR rendszerhez, amely a mobil kommunikációs hálózatok adóinak sugárzását használja fel. Az AW & ST kiadvány szerint az új radar biztosítja a lopakodó légi célpontok, köztük a KR lehallgatását. A tervek szerint az állomáson mintegy 900, a VHF sávban üzemelő diverzitás adóval és vevővel rendelkező csomópont fog működni, a rádióadók vivőfrekvenciái teljesítményben eltérőek. A rádióelnyelő anyagok felhasználásával készült repülőgépek, KR és UAV-k inhomogenitást hoznak létre az adók radarmezejében a rádióhullámok elnyelése vagy visszaverődése miatt. Külföldi szakértők szerint a célpont koordinátáinak meghatározásának pontossága a parancsnokságra több fogadóhelyről érkező adatok együttes feldolgozása után körülbelül 1,5 m lehet.
A készülő radarállomás egyik jelentős hátránya, hogy hatékony célérzékelés csak a védett légtéren való áthaladás után lehetséges, így kevés idő marad a légi cél elfogására. Az MP radar tervezési költsége körülbelül 156 millió dollár lesz, figyelembe véve a 900 vevőegység felhasználását, amelyeket elméletileg nem lehet letiltani az első rakétacsapással.
NLC Homeland Alert 100 érzékelő rendszer. Az amerikai Raytheon cég szakemberei az európai Tkhels céggel közösen kifejlesztettek egy passzív koherens NLC érzékelőrendszert, amelynek célja a kis sebességű, kis magasságú AT-k adatainak beszerzése, beleértve az UAV-kat, a CR-t és a lopakodó technológiával létrehozott célpontokat. A légierő és az amerikai hadsereg érdekében fejlesztették ki légvédelmi feladatok megoldását az elektronikus hadviselés alkalmazásának körülményei között, konfliktusövezetekben, valamint a különleges erők akcióinak biztosítását. létesítmények védelme, stb. Minden Homeland Alert 100 berendezés egy terepjáró alvázára (4x4) szerelt konténerbe kerül, de használható álló kivitelben is. A rendszer tartalmaz egy néhány perc alatt munkahelyzetben kihelyezhető antennaárbocot, valamint az összes észlelt rádiósugárzási forrásra és azok paramétereire vonatkozó adatok elemzésére, osztályozására és tárolására szolgáló berendezést, amely lehetővé teszi a hatékony észlelést és felismerést. különféle célpontok.
Külföldi sajtóértesülések szerint a Homeland Alert 100 rendszer a digitális VHF műsorszóró állomások, analóg TV adásadók és földi digitális TV adók által generált jeleket használja a célok megvilágítására. Ez lehetővé teszi a célpontok által visszavert jelek fogadását, azok koordinátáinak és sebességének észlelését és meghatározását a 360 fokos azimut szektorban, magasságban - 90 fokban, 100 km távolságig és 6000 m magasságig. A környezet éjjel-nappali, időjárás-ellenőrzése, valamint az autonóm működés lehetősége vagy információs hálózat részeként viszonylag olcsó módokat tesz lehetővé az alacsony magasságú célpontok észlelésének problémájának hatékony megoldására, beleértve a nehéz zavaró körülményeket is. , konfliktusövezetekben a légvédelem és rakétavédelem érdekében. A Homeland Alert 100 MP radar hálózati vezérlőrendszer részeként történő használatakor, valamint a figyelmeztető és vezérlőközpontokkal való együttműködés során az Asterix / AWCIES protokollt használják. Egy ilyen rendszer fokozott zajtűrése a többpozíciós információfeldolgozás elvén és a passzív működési módok használatán alapul.
A külföldi sajtó arról számolt be, hogy a Homeland Alert 100 rendszert számos NATO-ország tervezte megvásárolni.
Így továbbra is a NATO-országokkal szolgálatban lévő, fejlesztés alatt álló földi légvédelmi-rakétavédelmi radarállomások a színházban továbbra is a fő információforrások a légi célpontokról, és a fő elemei a légi célpontokról alkotott egységes kép kialakításának. légi helyzet.
(V. Petrov, S. Grishulin, "Foreign Military Review")
Az RU 2332684 számú szabadalom tulajdonosai:
A találmány radartechnológiára vonatkozik, különösen többpozíciós radarrendszerek felépítésére szolgáló eljárásokra. A találmány lényege: a többpozíciós radar eljárása, amely radarjelek kibocsátásából, a visszavert jelek szinkronizált vételéből álló helyzetű berendezésekkel, jelek és információk kombinálásából és együttes feldolgozásából áll a célpontok észlelésére, koordinátáik mérésére, a pályák paramétereinek meghatározása és az azt követő azonosítás, míg a találmány szerint egymástól elosztott helyzetű berendezésekkel szinkronizált jelkibocsátást és vételt hajtanak végre távvezetékek segítségével. A többpozíciós radar eszköze kommunikációs csatornákkal és szinkronizációs csatornákkal összekapcsolt információfeldolgozó pontot tartalmaz az egymástól távol elhelyezett pozíciók berendezéseivel, míg az egymástól távol elhelyezett pozíciók berendezései távvezetékekre csatlakoznak. A találmány elérhető műszaki eredménye a többpozíciós rendszerek fő előnyeinek megvalósítása. 2 n.p. f-ly, 1 ill.
A találmány radartechnológiára vonatkozik, különösen többpozíciós radarrendszerek felépítésére szolgáló eljárásokra.
A nagyfrekvenciás kommunikáció ismert módszerei távvezetékeken (TL) [például Mikutsky G.V., Skitaltsev B.C. Nagyfrekvenciás kommunikáció távvezetékeken keresztül. Tankönyv energetikai és energetikai építőipari technikumok hallgatóinak. 2. kiadás, átdolgozott. és további M.: Energia, 1978], a nagyfrekvenciás (HF) jelek kibocsátására és vételére alapozva a nagyfrekvenciás (HF) vezetékekben HF-csatlakozó berendezéseken keresztül.
Ezek a kommunikációs módszerek az információtovábbítás és -feldolgozás problémáinak megoldására összpontosítanak, nem pedig a radarra.
Ismert helymeghatározási módszerek az elektromos vezetékek sérülésének helyének meghatározására [például Shalyt G.M. Sérülési helyek azonosítása elektromos hálózatok. - M.: Energoizdat, 1982], beleértve az összetett jelek használatát [Kulikov A.L., Kulikov D.A. 2269789 számú szabadalom "Módszer az erőátviteli és kommunikációs vezetékek károsodásának helyének meghatározására és az azt megvalósító eszköz", 2006.02.10., Bull. 4. szám, G01R 31/11. MCP].
Ezek a helymeghatározási módszerek azonban az elektromos vezetékek sérüléseinek észlelésére irányulnak, nem pedig radarfeladatokra.
Ismert módszerek a nagyfeszültségű tápvezeték legrövidebb távolságának meghatározására a repülőgéptől [például Yablonsky V.M., Terekhova L.A. 2260198 számú szabadalom "Módszer a repülőgép nagyfeszültségű vezetékének legrövidebb távolságának meghatározására", 2005.10.09., G01S 13/93, G08G 5/04].
Ezek a módszerek azonban az elektromos vezetékek által kibocsátott jelek egypozíciós vételén alapulnak, általában ipari frekvenciájú.
A többpozíciós radar ismert módszerei [például Chernyak B.C. többállású radar. - M.: Rádió és kommunikáció, 1993], valamint az elhelyezett radarállomások és rendszerek [például Averyanov V.Ya. Változatos radarállomások és rendszerek. Mn., "Science and Technology", 1978], amelyek jelentős előnyökkel rendelkeznek a hagyományos egyállású radarrendszerekkel szemben.
Ezeket a módszereket és rendszereket azonban nem az erősáramú vezetékekben lévő célpontok által visszavert jelek generálására és feldolgozására szánják.
A javasolt találmányhoz legközelebb álló műszaki megoldás egy többpozíciós radar-eljárás, amelyet többpozíciós radarrendszerben valósítanak meg [Bakulev P.A. Radar rendszerek. Tankönyv középiskoláknak. - M .: Rádiótechnika, 2004, 21. o.], beleértve az elosztott pozíciók berendezését, információátviteli csatornákat, szinkronizációs csatornákat és információfeldolgozási pontot.
A többpozíciós radar módszere radarjelek kibocsátásából, a visszavert jelek szinkronizált vételéből áll, egymástól távol elhelyezkedő pozíciókat ellátó berendezésekkel, a jelek és a távolságra lévő pozíciók információinak kombinálásából és együttes feldolgozásából egy információfeldolgozási ponton a célok észlelésére, koordinátáik mérésére, a pályaparaméterek meghatározása és az azt követő azonosítás.
A többpozíciós radar ezen módszere lehetővé teszi a többpozíciós rendszerek fő előnyeinek megvalósítását az egypozíciós rendszerekhez képest [Bakulev P.A. Radar rendszerek. Tankönyv középiskoláknak. - M .: Rádiótechnika, 2004, 21. o.]:
Komplex térbeli betekintési területek kialakításának lehetősége;
Jobb energiafelhasználás a radarrendszerben;
A célpontok térbeli elhelyezkedésének pontosabb mérése;
A zajvédelem javítása az aktív és passzív interferencia vonatkozásában, valamint a taktikai feladat végrehajtásának megbízhatóságának növelése.
A találmány lényege, hogy ezeket az előnyöket növelje a sugárzás felhasználásával és a nagyfrekvenciás jelek vételével az elektromos vezetékekről.
Ezt a problémát a többpozíciós radar módszere oldja meg, amely radarjelek kibocsátásából, a visszavert jelek szinkronizált vételéből áll az egymástól távol elhelyezkedő pozíciók berendezésével, a jelek és információk kombinálásából és közös feldolgozásából a célpontok észleléséhez, koordinátáik méréséből, a pályák paramétereinek meghatározása és az azt követő azonosítás, amelyben a találmány szerint az egymástól elosztott pozíciók berendezései szinkronizált jelek kibocsátását és vételét hajtják végre távvezetékek segítségével.
A többpozíciós radar javasolt módszerében a korábban említett előnyök növelésének előfeltételei a következők.
1. Az erősáramú vezetékek hosszúak, és rádiófrekvenciás csatlakozóberendezésekkel különféle antennarendszerekbe kombinálhatók.
Mivel a célpontok szögkoordinátáinak mérésének lehetséges pontossága (a szögkoordináták mérésének négyzetes középhibája) [Shirman Ya.D., Manzhos V.N. A radarinformáció-feldolgozás elmélete és technikája az interferencia hátterében. - M.: Radio and communication, 1981, pp. 214-216.] függ a jel-zaj viszonytól, valamint az antenna apertúra hosszának a hullámhosszhoz viszonyított arányától, majd a kiterjesztett tápvezetékek alkalmazása lehetővé teszi a célok szögkoordinátáinak nagyobb pontosságú mérését.
2. A távvezetékek összetett konfigurációja, valamint redundanciájuk széles lehetőségei jelentősen növelik egy ilyen többpozíciós radarrendszer megbízhatóságát. Ezenkívül meg kell jegyezni, hogy egy vezetéknél a HF csatlakozó berendezés általában mindhárom fázison (A, B, C) található, így mindegyik fázis felhasználható a többpozíciós radar problémáinak megoldására. .
Meg kell azonban jegyezni a többpozíciós radar javasolt módszerének jellemzőit.
1. Mivel a rádiófrekvenciás jelek terjedésének a tápvezetékekben számos jellemzője van [Hayashi S. Waves in power lines. - M.: Gosenergoizdat, 1960.], akkor a célpontoktól kapott jelek tanulmányozása, együttes feldolgozása az elosztott pozíciók berendezésével és az információfeldolgozó ponttal specifikus. A specifikusság elsősorban az erősáramú átviteli vezetékek, mint RF jelek átvitelének közege, diszperzív tulajdonságaival, terjedésük fázis- és csoportsebességeinek különbségével függ össze.
2. A HF csatlakozó berendezésen keresztül egy távvezetékhez (vagy több nagyfrekvenciás kapcsolattal összekötött távvezetékhez) több, egymástól elválasztott pozíciójú adó-vevő berendezés csatlakoztatható. Így az RF jelek szinkronizált együttes kibocsátása egyetlen átviteli vonalba lehetővé teszi az elektromágneses tér összetett, gyorsan változó eloszlásának megvalósítását nagy térbeli területeken. Az ilyen kiegészítő képességek azonban nehézségeket okoznak a térbeli megtekintési területek szabályozásának kialakításában.
3. Az erősáramú vezetékek összetett konfigurációja, a különböző feszültségosztályú távvezetékek jelenléte és ezek kölcsönös befolyása olyan feldolgozási jellemzőket eredményez, amelyek jelentősen megkülönböztetik a hagyományos többpozíciós radar- és jelfeldolgozási módszerektől a fázisos antennatömbökben [Radioelectronic systems: az építés és az elmélet alapjai. Kézikönyv / Szerk. Ja.D.Shirman. - M.: CJSC "MAKVIS", 1998].
Emellett felhívjuk a figyelmet arra, hogy a többpozíciós radar javasolt módszerét megvalósító eszközök nemcsak radarproblémák megoldására (célpontok észlelése, koordinátáinak, paramétereinek mérése stb.), hanem a sérülés helyének diagnosztizálására is használhatók. a villanyvezetékekre.
A javasolt eljárás megvalósítható egy olyan eszközzel, amely kommunikációs csatornákkal és szinkronizációs csatornákkal összekapcsolt információfeldolgozó pontot tartalmaz az egymástól távoli pozíciójú berendezésekhez, amelyek nagyfrekvenciás összekötő berendezésen keresztül csatlakoznak a villamos vezetékekhez.
Vegye figyelembe, hogy a szinkronizáláshoz a javasolt eszköz megfelelő csatornái helyett műholdas navigációs rendszerek (például GPS) használhatók.
A rajzon a javasolt módszert megvalósító eszköz blokkvázlata látható.
Az eszköz tartalmaz egy információfeldolgozó 1 pontot, 2 kommunikációs csatornákat, 3 szinkronizációs csatornákat, 4 távolsági helyzetű berendezést, 5 nagyfrekvenciás összekötő berendezést, 6 elektromos vezetékeket.
Az 1. információfeldolgozási pontot a 2. kommunikációs csatornák és a 3. szinkronizációs csatornák kötik össze a 4 egymástól távol elhelyezkedő berendezésekkel, amelyek az 5. nagyfrekvenciás kapcsolat berendezésén keresztül csatlakoznak a 6 tápvezetékekhez.
Tekintsük az eszköz működését a légi célok helyének példáján. Ebben az esetben a többpozíciós radar eszköz aktív, passzív és aktív-passzív üzemmódban működhet.
A legelterjedtebb az aktív-passzív mód, amikor a radarjelek kisugárzása az űrbe egy vagy több egymástól elhelyezett 4. pozíció berendezésével történik, és a légi célpontokról visszavert jelek vétele - minden rendelkezésre álló berendezéssel 4.
A légi célpontokról visszaverődő jelekben található 4 fázisú, térbeli pozíciók használatától függően a térben koherens, rövid távú térbeli koherenciával és térben inkoherens feldolgozás egy változata valósul meg [Bakulev P.A. Radar rendszerek. Tankönyv középiskoláknak. - M.: Rádiótechnika, 2004, 21-22.o.]. A felsorolt ismert feldolgozási lehetőségekkel ellentétben azonban a javasolt eszköz figyelembe veszi a jelterjedés jellemzőit a 6. erősáramú átviteli vonalak mentén. Mindenekelőtt tartalmaznia kell:
A nagyfrekvenciás jelek terjedési sebességének függősége a 6. átviteli vezeték tervezési paramétereitől (huzalmárka, felfüggesztés magassága stb.);
Elosztó eszközök 6. távvezetékekhez (a nagyfrekvenciás jelek távvezetékek mentén, különböző frekvenciájú terjedésének eltérő jellemzői);
A 6. távvezeték jellemzőinek időjárási függősége, elsősorban a reaktancia, valamint ez utóbbinak a Föld fajlagos ellenállásától való függése;
Specifikus aktív és passzív interferencia jelenléte, amelyet például a nagyfrekvenciás kommunikációs rendszerek működése, relévédelem, koronakisülések, valamint a szomszédos 6-os távvezetékek stb.
Számos egyéb tényező.
Lehetőség van azonban ezen tényezők hatásának csökkentésére. Amikor ez megtörtént, a 6 átviteli vonalról kapott jelek feldolgozása eredményeként kapott információt korrigálják, összehasonlítva azokat azokkal az információkkal és jelekkel, amelyeket a 4 távolságban lévő pozíciók berendezései vettek más radarberendezésektől. Fordított jelenség is lehetséges, amikor a 6. távvezetékről kapott információk és jelek kiegészítik vagy korrigálják a 4. távolságra lévő más radarberendezésektől kapott információkat és jeleket.
Az 1. információfeldolgozó ponton a koherens jelek, videojelek, légi célpontok észlelt jelei, egyetlen paramétermérés eredményei, valamint a pályák kombinálása történik.
Koherens kombinálással a nagyfrekvenciás jelek a 4 távközzel elhelyezett pozíciók berendezéseiből az 1 információfeldolgozó pontra kerülnek, ahol a légi célpont mozgási paramétereinek és elhelyezkedésének észlelésére, azonosítására és meghatározására szolgáló összes műveletet végrehajtják. A 6 átviteli vonalon a nagyfrekvenciás jelek terjedésének sajátos körülményei által okozott tényezők kompenzálása az 1 információfeldolgozási ponton történik. Ebben az esetben a 4 egymástól távol elhelyezkedő pozíciók berendezését az egyszerűség jellemzi, és az információ Az 1. feldolgozási pont bonyolultabbá válik, emellett szélessávú 2 információátviteli csatornákra van szükség, amelyek nagy sávszélességgel rendelkeznek.
A légicélok röppályáinak kombinálásakor a távközzel elhelyezett 4 pozíciók berendezéseinek jelei a másodlagos feldolgozás és a hamis céljelek elutasítása után érkeznek az 1 információfeldolgozó pontra. A 6 átviteli vonalon a nagyfrekvenciás jelek terjedésének sajátos körülményeiből adódó tényezők kompenzálását a 4 elosztott pozíciók berendezései végzik. Ezért a számítási műveletek nagy részét az elosztott pozíciók berendezései végzik. 4, ami bonyolultabb. Az 1 információfeldolgozó pont berendezése leegyszerűsödik, a 2 információátviteli csatornák könnyebb körülmények között működnek.
Így az eszköz (lásd a rajzot) elektromos vezetékeinek 6 nagyfrekvenciás csatlakozóberendezésekkel való használata 5 lehetővé teszi további információs és energiaképességek megvalósítását a többpozíciós radar számára.
1. A többpozíciós radar módszere, amely radarjelek kibocsátásából, a visszavert jelek szinkronizált vételéből áll, egymástól távol elhelyezett helyzetű berendezésekkel, a vett jelek és más radarlétesítményektől kapott, egymástól távoli helyzetekre vonatkozó információk kombinálásában és együttes feldolgozásában, a célpontok észlelésére, koordinátáik mérésére, a pályák paramétereinek meghatározására és az azt követő azonosításra szolgáló információfeldolgozó pont, azzal jellemezve, hogy ezen túlmenően az erőátviteli vezetékekhez (PL) nagyfrekvenciás összekötő berendezéssel csatlakoztatott, egymástól távolságra lévő pozíciók berendezése ), szinkronizált jelkibocsátást és -vételt hajtanak végre PTL segítségével, majd a kapott információ feldolgozása során a tápvezetékről kapott jelek feldolgozása eredményeként kapott információt korrigálják úgy, hogy összehasonlítják azokat a céltárgyakról visszavert jelekkel. távolságra elhelyezett pozíciók felszerelésével, és a berendezés által kapott információkkal oh távolságra lévő pozíciók más radarberendezésektől.
A többpozíciós radar fő ötlete az elektromágneses mező térbeli jellemzőiben található információk hatékonyabb felhasználása (mint a hagyományos egypozíciós radarok esetében). Mint ismeretes, a célpont besugárzásakor a teljes térben kósza mező keletkezik (az árnyékolt területek kivételével). Az egypozíciós radar a vevőantenna apertúrájának (összetett antennák sugárzó vagy vevő sugárzási felületének.) megfelelő mezőnek csak egy kis szakaszából nyer információkat. Az MPRLS-ben a cél kóbor mező (illetve a jelforrások sugárzási mezőjének) több, egymástól bizonyos távolságra lévő szakaszaiból nyerik ki az információkat, ami jelentősen növelheti az információtartalmat, a zajtűrést és számos más fontosabb jellemzőt.
A többpozíciós radar fejlesztése megfelel a technológia általános trendjének - az egyes technikai eszközök olyan rendszerekké való kombinálásának, amelyekben az elemek együttes működése és kölcsönhatása következtében a fő jellemzők jelentősen javulnak, és új lehetőségek jelennek meg.
Az MPRLS, valamint az egypozíciós radarok végső feladata általában a célpontok koordinátáinak meghatározása és röppályáik felépítése (ha a radarhoz képest mozognak). Ezért a jelek észlelésének és paramétereik megváltoztatásának problémáit általánosságban véve együtt kell tekinteni egyetlen statisztikai problémaként. Ha egy egypozíciós radar lefedettségi területén több célpont is van, akkor az azonos célpontokhoz kapcsolódó, különböző időpontokban kapott észlelt jelek és mérések azonosításának (azonosításának) a problémája. Az MPRLS-ben ezen túlmenően szükség van ugyanazon célpontok koordinátáinak mérésére, amelyeket egymástól térben elhelyezett méterek alkotnak (pontközi azonosítás). Így az MPRLS-ben többcélú szituáció esetén egyetlen statisztikai problémát kell figyelembe venni: „detektálás – azonosítás – mérés”.
Az egypozíciós radarok gyakorlati tapasztalatai azonban azt mutatják, hogy a jelészlelés és paramétereik mérésének külön optimalizálása nem vezet észrevehető veszteségekhez. Mint ismeretes, az optimális (és az optimálishoz közeli) detektoroknak és mérőknek jelentős közös része van, és hasonló eszközökkel és algoritmusokkal valósítják meg őket. Ezért a legtöbb radarelméleti kézikönyvben a jelparaméterek detektálási és mérési problémáinak sokkal egyszerűbb külön vizsgálata módszertani és gyakorlati szempontból is igen indokolt. Ugyanez vonatkozik az azonosítás problémájára is.
A többpozíciós radarok fő előnyei
Az elosztott pozíciók által kapott információk közös feldolgozása miatt az MPRLS jelentős előnyökkel rendelkezik mind az egypozíciós radarral, mind az egyedi radarkészlettel szemben, amelyek nincsenek többpozíciós rendszerré kombinálva. Az alábbiakban megjegyezzük az MPRL-ek fő előnyeit az egypozíciós radarokhoz képest.
Lehetőség a kívánt konfigurációjú lefedettség létrehozására, figyelembe véve a várható radarhelyzetet. Az egypozíciós radarhoz képest további paraméterek, amelyek meghatározzák az MPRLS lefedettségi területét, a pozíciórendszer geometriája és a közös információfeldolgozás algoritmusa. Ez különösen lehetővé teszi a lefedettség adott irányban történő bővítését. A mozgó helyzetű MPRLS-ben lehetőség van a lefedettségi terület rugalmas célirányos deformálására.
energetikai előnyök. Nyilvánvaló, hogy tetszőleges számú adó és (vagy) vételi pozíció hozzáadása egy egypozíciós radarhoz növeli a rendszer teljes energiáját. További energiaelőnyök is megjelennek az MPRLS-ben. Mindenekelőtt jelentős energianyereséget biztosít a jelek kooperatív vétele, amelyben az egyes adási pozíciók sugárzási energiáját minden vevőhely felhasználja.
A pozíciók megfelelő elválasztása esetén a visszhangjelek ingadozása a különböző vételi pozíciókban (vagy a célpontok különböző adási pozíciók általi besugárzása következtében keletkező visszhangjelek) statisztikailag független. Az információkombináció során fellépő ingadozások kisimítása további energianyereséget biztosíthat, különösen, ha a célpontok nagy valószínűséggel történő észlelésére van szükség. Ez az erősítés az autonóm vétellel rendelkező MPRS-ben is lehetséges, sőt, különböző frekvencián működő radarok kombinálásakor is. Nagy pozíciótávolság esetén, amikor a célpont és az adó és vételi pozíció irányai közötti szög megközelíti a 180°-ot, a cél tényleges szórási területe (ESR), azaz a vételi pozíció bemeneti jelintenzitása , jelentősen megnövelheti. Számos műszaki oka is van annak, hogy energetikai előnyöket biztosítanak. Például az adási és vételi pozíciók elkülönítése csökkenti a mikrohullámú energiaveszteséget az antennakapcsolók, vevővédelmi eszközök stb. megszüntetésével.
A céltárgy térbeli helyzetének nagy pontosságú mérése.
Az egypozíciós radarban a szögkoordináták mérése alapján a célpont képsíkbeli helyzetének meghatározásának pontossága általában sokkal kisebb, mint a mérési tartomány pontossága, különösen távoli célpontok esetén. Az MPRLS-ben lehetővé válik három célkoordináta meghatározása úgy, hogy megmérjük a hatótávolságot több egymástól távol eső radarhoz, vagy a teljes hatótávolságot (adási pozíció - célpont - vételi pozíció) több távolságra lévő pozícióhoz viszonyítva.
Az 1. a ábra a hibatestek metszeteit mutatja, miután megmértük a két egymástól távol eső radar célkoordinátáit. A térben minden hibatest általában erősen lapos ellipszoid. A metszéspontjuk hibatestet képez két radar információinak közös feldolgozása során. Látható, hogy a célpont helyének becslésének pontossága meredeken növekszik, elsősorban a távolságméréseknek köszönhetően. Feltételezhető, hogy az MPRLS-ben végzett távolságmérések lehetővé teszik a célpont szögkoordinátáinak becslésének pontosságát az egypozíciós radarhoz képest.
a - két radar MPRLS autonóm jelvétellel, b - MPRLS egy adó Tx és két vevő Pr1 és Pr2 pozícióval
1. ábra - A célpont koordinátáinak mérési pontosságának javítása:
A szögpontosság közelítő számításaihoz célszerű a célpont szögkoordinátájának (a célon és mindkét radaron áthaladó bisztatikus síkban) a négyzetes középhibának (RMS) közelítő kifejezését használni. hatótávolság mérések minden radarpárban:

ahol a hatótávolság mérésének RMS értéke minden radarban (feltételezzük, hogy a hibák függetlenek, és az RMS azonos);
L - bázis a radarok között;
és - a szög, amely meghatározza a cél irányát;
Hatékony alap.
Ha az MPRLS nem két radarból áll, hanem egy adó-vevő és egy vevő pozícióból vagy egy adó és két vevő pozícióból, akkor (1) helyett kapjuk (lásd 1. ábra, b)

ahol - az "adási pozíció - cél - vételi pozíció" teljes tartomány mérési RMS-e;
ahol c- a fény sebessége;
A jel érkezési idejének RMS mérése ().
Látható, hogy a két, autonóm jelvételű radarból álló rendszerről az egy adó- és két vételi pozícióval rendelkező MPRS-re való átállás (amelyek közül az egyik kombinálható az adóval) az effektív bázis felére csökkenésével egyenértékű. a hatékony bázis "működik".
Az (1) és (2) képleteket a céltartomány alaphoz viszonyított arányának nagy értékei mellett kapjuk meg (R/L>>1), de becsült számításokhoz már R>( 2…3)L.
Az (1) és (2)-ből az következik, hogy nagy tartomány mérési pontosság (azaz szélessávú jelek) és kellően nagy bázisok mellett az RMS lényegesen kisebb lehet, mint a hagyományos egypozíciós célirány-mérésnél. Például, amikor az (1) szerint megkapjuk és a (2) szerint, az MPRLS ezen tulajdonsága lehetővé teszi bizonyos esetekben a nagy, drága antennák kis, gyengén irányított antennákra való cseréjét, miközben megőrzi a nagy pontosságot a célpontok helyének meghatározásában.
Ugyanakkor az (1), (2) és az 1. ábrából látható, hogy kis bázisokkal (amikor a hibaellipszoidok közel párhuzamosak egymással) és (vagy) nagy hibák esetén a tartománymérésnél a finomítás A célpont szöghelyzetének meghatározása a hatótávolság vagy a teljes hatótávolság mérésével jelentéktelen lehet. Ebben az esetben a pontosság növeléséhez a csapágyak egymástól távol eső kombinációja adja a fő hozzájárulást. Ilyen helyzet áll elő például kis emelkedési szögek mérésekor földi MPRS-ben, mivel az effektív alap ebben az esetben arányos a magassági szög szinuszával.
Általános esetben, ha az egyes célpontok elosztott MPRLS-pozícióival mért „elsődleges koordinátáinak” (tartományok, teljes tartományok, iránypontok) összesített száma meghaladja a térbeli helyzetének meghatározásához szükséges minimumot, akkor a pontosság növelésére redundáns méréseket alkalmaznak. MPRS-ben történő célkövetéskor gyakran nagyobb arányú információérkezés lehetséges, mint az egypozíciós radarnál, ami szintén növeli a pályák felépítésének pontosságát.
Képes a célpont sebességvektorának és gyorsulásának mérésére Doppler módszerrel. A jelek Doppler-frekvencia-eltolódásainak mérése több egymástól távol eső helyen lehetővé teszi a célpont sebességvektorának megtalálását.
A legegyszerűbb két, az L bázisnál elhelyezett radarból álló rendszerben, autonóm jelvétel mellett a mért Doppler-frekvenciaeltolódások (DFS) egyenlőek és ahol v- célsebesség vektor; r 1 , r 2 - vektorok a céltól az RLS1 és RLS2 irányába. Ha egy v a radar1, radar2 és a cél síkjában fekszik (vagy ha v -- a célpont sebességvektorának vetítése erre a síkra), akkor a 2. ábrából könnyen előállíthatók a radiális és a tangenciális (ugyanazon síkban lévő) komponens RMS-ének egyszerű képletei. v . Ezek a képletek kényelmesek a becsült számításokhoz.
ahol - a DFS-mérés RMS-e minden radarban (ezeket azonosnak tekintjük);
hullámhossz;
R - céltartomány; és - ugyanaz, mint az (1).
Az (1.3) jobb oldali részében lévő közelítő egyenlőségek megfelelnek a "kis bázis" feltételnek: R/L>>1, amikor Látható, hogy az RMS frekvencia azonos mérési pontosságával a tangenciális sebesség többszöröse, mint a radiális sebesség.

a - két radar MPRLS autonóm jelvétellel; b - MPRLS egy radarból és egy vevő PR pozícióból ( v R1és v R2- radiális sebességek a radar1-hez és radar2-höz viszonyítva; v Rés v f- radiális és tangenciális sebességek MPRLS-ben)
ábra -- 2 Doppler változás a célpont v sebességvektorában az L alapsíkban
Ha egy radar, például radar2 helyére vételi pozíció kerül (1.2. ábra, b), akkor. Ahol
A (4)-et a (3)-mal összevetve azt látjuk, hogy az RMS 1-szeresére nőtt, és a tangenciális sebesség mérésénél, valamint a szögkoordináta mérésénél az egyik radar vételi pozícióra cseréje a tény, hogy a hatékony bázisnak csak a fele „működik”. Ugyanezt az eredményt kapjuk, ha a vételi pozíció helyett a radar2-t az effektív alap közepére (a c bisztatikus szög felezőjére) helyezzük.
A Doppler-frekvencia-eltolódások változási sebességének mérésével, vagy a sebességvektor összetevőinek differenciálásával megkaphatjuk a célpont gyorsulási vektorát. A sebességre és a gyorsulásra vonatkozó Doppler-becslések használata javítja a pályatervezés pontosságát és a célkövetés minőségét, különösen azokon a területeken, ahol hirtelen sebességváltozások következnek be (repülőgép manőver vagy ballisztikus célpont lassulása a légköri belépés során). Bizonyos feltételek mellett az MPRS csak a Doppler-frekvencia-eltolódások mérési eredményei, valamint a magasabb rendű tartomány időderiváltjai alapján képes nyomon követni a célpontokat.
Három koordináta és sugárforrás sebességvektorának mérési lehetősége. Ellentétben az egypozíciós és bisztatikus radarokkal, amelyek passzív módban csak a jel érkezési irányait, azaz a sugárforrások irányát határozzák meg, az MPRLS-ben három térbeli koordináta, valamint ezek deriváltjai nyerhetők. Ehhez vagy a háromszögelési vagy hiperbolikus módszert, vagy a kettő kombinációját alkalmazzuk. Nál nél háromszögelés a sugárforrás térbeli helyzetét az egymástól eltérő vételi helyzetekben kapott csapágyak metszéspontja határozza meg, hiperbolikus módszer - a forgási hiperboloidok és a gócok metszéspontjával a fogadó pozíciók helyein. Minden hiperboloid egy felület, amelyen a forrás helyezkedik el, ha az általa kibocsátott jelek útjában a különbség rögzített (azaz a forrás és a pozíciópár közötti távolságok különbsége). Az útkülönbséget az a késleltetés becsüli meg, amelyet egy pozíció útján kell bevinni, hogy elérjük az e pozíciópár által vett jelek maximális keresztkorrelációját. Vegye figyelembe, hogy ha az R jelforrás távolsága többszörösen nagyobb, mint az L vételi pozíciók közötti távolság, akkor ezen módszerek bármelyikének alkalmazásakor a forrás szögkoordinátáinak mérési hibája nem függ a távolságtól (így a lineáris hiba a képsíkban arányos a távolsággal), a mérési hibatartomány pedig a tartomány négyzetével arányos.
A jelforrás helyének pontosságának háromszögelési és hiperbolikus módszerekkel történő hozzávetőleges összehasonlításához célszerű egy egyszerű összefüggést használni: R/L>>1-nél az útkülönbség mérése RMS-sel a hiperbolikus módszerben megközelítőleg egyenértékű a csapágyakkal. mérés háromszögelési módszerrel RMS-sel
hol van a tényleges bázis a fogadó pozíciók között.
Például a jelek útkülönbségét mérő RMS m-nél km-nél megközelítőleg egyenértékű az alap közepére szerelt iránymérővel, amely a jelforrás szögkoordinátáját méri (a forráson áthaladó síkban, ill. mindkét pozíció) RMS-sel.
A mozgó forrásból egymástól távol eső helyzetpárok által vett jelek keresztkorrelációs függvényének Doppler-frekvencia-eltolódásának mérése lehetővé teszi a forrás sugárirányú sebességének e pozíciókhoz viszonyított különbségének meghatározását. A négy vagy több vételi pozícióval rendelkező MPRLS-ben a forrássebesség-vektor a Doppler-módszerrel határozható meg. Háromszögeléskor a jelforrás sebességének becslése csak a koordináták becsléseinek differenciálásával lehetséges.
A három koordináta és a sugárforrás sebességvektorának mérési képessége az MPRLS-ben fontos a pályájuk felépítéséhez. Ez vonatkozik az IAP-re is, amikor az általuk keltett interferencia hátterében nem lehetséges a lefedett célpontok kísérése (beleértve az önfedés során is, amikor az IAP a célpontra van telepítve). Az MPRLS passzív üzemmódja az ellenség légvédelmi (AD) radarjának helyének felderítésére is használható.
Felbontás javítás. A radar és az MPRLS felbontásának teljes jellemzője a célparaméterek észlelésének és mérésének valószínűségi és pontossági jellemzői „zavaró” objektumok vagy egyéb interferenciaforrások jelenlétében. A mérnöki számításokhoz a Rayleigh felbontási kritériumon alapuló egyszerűsített („determinisztikus”) megközelítést széles körben alkalmazzák. Bármely radarparaméter (hatótávolság, szögkoordináták, sebesség) felbontásának mértékeként (ennél a paraméternél) a célponttól érkező jelre adott válasz hosszát veszik figyelembe.
Ez azt jelenti, hogy két pontcél feloldható, azaz külön detektálható, mérhető paraméter, ha a köztük lévő távolság bármely paraméternél nagyobb, mint az egyes célpontok jelére adott válasz hossza. Feltételezzük, hogy a jelek közel azonos intenzitásúak. A válasz hosszát a kiválasztott szinten (például -3 dB a maximumtól) a megfelelő paraméter binjének nevezzük. A Rayleigh-kritérium használata lehetővé teszi az MPRLS előnyeinek vizuális értékelését a felbontás tekintetében.
Először tekintsük az aktív MPRL-eket (vagy az aktív-passzív MPRL-ek aktív módját). A 3. ábra két olyan célpontot mutat be, amelyeket egy egypozíciós radar1 nem képes feloldani.

a - a radar és az 1. és 2. célpontok elhelyezkedése; b, c - a vevők, RLS1 és RLS2 kimeneti jelei; felbontási elemek: db - szög szerint (a DN fő lebenyének szélessége); d R- tartomány szerint, d t c- a jelzések érkezési idejére)
3. ábra - Egy radar által nem feloldott célpontok felbontása az MPRLS-ben1
A tartomány és a szögkoordináták ugyanabban a tálcában vannak. Ha, mint általában lenni szokott, a hosszirányú felbontás (tartományban) lényegesen nagyobb, mint a radar felbontása keresztirányban (az égbolt síkjában), akkor a célpontok RLS1-hez viszonyított szögkoordinátáinak különbsége előfordulhat. elegendő az RLS2 számára, hogy feloldja őket a tartományban. Ez úgy értelmezhető, mint az MPRLS azon képessége, hogy az antennák vételi sugárzási mintázatának (RP) fő nyalábjaiban a szögkoordináták szerint feloldja a célokat. A két radarból álló kétrendszer egyenértékű szögfelbontása az egyes radarok hatótávolság-felbontásán keresztül becsülhető meg: (c a fénysebesség, a jel spektrum szélessége). Könnyen kimutatható, hogy ha a céltartomány R többszöröse az alapnak L akkor a radar között

Ha a célpontokat a vételi pozíció az adó pozíció - a cél - a vételi pozíció teljes hatótávolságára nézve feloldja, akkor
A (6) és (7) di értéke egy radarpár, illetve egy pár vételi pozíció "eredményes sugárzási mintázata" (RDP) fő lebenyének szélességeként tekinthető (az elhaladó síkban). a célponton és ezeken a radarokon vagy vevőállásokon keresztül). A termék kellően nagy értékéhez L ef Df c az RDN szélessége sokkal kisebb, mint az antennamintázat szokásos szélessége. Például mikor L ef= 30 km, Df c\u003d 10 MHz a (6) szerint di \u003d 10 -3 rad? 3.4?. Kis szögeknél és az alapvonal és a cél iránya között azonban az effektív alap csökkenése L ef =Lsini az RDN kiterjesztéséhez és a felbontás romlásához vezet. Ilyen helyzet áll elő például egy földi MPRLS-ben, amikor a horizonton túl magasan megjelenő célpontokat határoznak meg.
Passzívban MPRLS háromszögelés esetén a felbontás térbeli elemét az antennamintázat metszésterülete határozza meg. Ellentétben az egypozíciós radarral, két, egymástól távol eső vételi pozíció hatékony alappal L ef tartomány felbontású R, amely megközelítőleg (R>>L esetén) a képlettel kifejezhető

ahol db a vételi pozíciók antennamintájának főlebenyének szélessége (4. ábra). A (8)-ból az következik, hogy a felbontás általában alacsony. Például mikor L ef= 30 km és db = 10 -2 rad? 34? d R? 30 km-ért R= 300 km és d R? 16,7 km-re R= 200 km. Ebben az esetben a keresztirányú (a tartományhoz képest) irányú felbontást az érték becsüli meg R dB, azaz azonos feltételek mellett 3 és 2 km. Az egyes pozíciókhoz viszonyított tartomány felbontása elérheti R db, ha a jelforrások és a vételi pozíciók irányai közötti szög megközelíti a 90°-ot. A passzív MPRLS-ben az egymástól távol eső pozíciók által vett jelek korrelációs feldolgozásával a felbontást a jelkeresztkorrelációs függvény burkológörbéjének fő lebenyének késleltetése vagy útkülönbsége határozza meg. Ez rendre egyenlő Df?1/Df cés dDR?c/Df c. Ebben az esetben a (7) képlet egy vételi pozíciópár RDN-jére érvényes (a R>>L). A termék kellően nagy értékéhez L ef D f c megbízhatóan fel lehet oldani a vételi pozíciók antennamintájának fő lebenyeiben elhelyezkedő, azaz nem szögkoordinátákkal feloldott, egymással nem korrelált jelek forrásainak útkülönbségét.

a - az MPRLS általános felépítése korrelációs jelfeldolgozással és az 1. és 2. források elhelyezkedése; b - a korrelátor kimeneti jeleinek burkológörbéje
4. ábra – A passzív MPRLS-ben a szögkoordinátákkal nem feloldott sugárforrásjelek útkülönbség szerinti felbontása
A nagy „szög” felbontás nagyobb tartományfelbontást is biztosít, mint a háromszögelési rendszerek. A (8)-ból az (5) figyelembevételével becslést kapunk a felbontási elemre az at tartományban R>>L:

ahol dd R- felbontási elem az útkülönbséghez.
Hangsúlyozzuk, hogy az MPRLS-ben csak az egymástól elválasztott pozíciókban korrelált jeleknél érhető el nagy térbeli felbontás (a késleltetési különbség kiküszöbölése után). Ha a vételi pozíciók bemenetein a véletlenszerű folyamatok nem korrelálnak egymással, akkor a keresztkorrelációs függvény burkológörbéje által meghatározott felbontási elem nem képezhető térben. Ez a helyzet általában akkor fordul elő, amikor az MPRLS passzív interferenciáját figyeljük meg - a zavaró reflektorok (SMO) csoportjaiból származó visszhangjeleket.
Az áteresztőképesség növelése. Az áteresztőképesség általában a célpontok maximális számát jelenti, amelyet a radar egy adott időintervallumban ki tud szolgálni. Az állandó felmérési ciklusú megfigyelő radaroknál az áteresztőképességet csak a radar feldolgozó berendezésének képességei (például a célpályákat számító számítógép teljesítménye) korlátozzák. Az utóbbi években elterjedtek az elektronikus pásztázó radarok, amelyekben ésszerűbben használják fel a radar energia- és információforrásait. Az antennamintázat gyors (néhány mikroszekundum alatt) bármely irányba történő átvitele (az elektronikus pásztázási szektoron belül) lehetővé teszi a célpontok áttekintésének és keresésének hatékony kombinálását az észlelt célpontok követésével. A követett célpontok szondázásai közötti intervallumokat, valamint az egyes szondázások energiáját a bejövő információk elemzése eredményeként adaptívan választják ki. Az egyidejűleg követett célpontok számának korlátozását nemcsak a berendezés teljesítménye, hanem az energia és a pontosság jellemzői is meghatározzák.
Például a kívánt pontosságú pályák megépítéséhez a követett célpontok szondázásai közötti intervallum átlagosan ne legyen több T s-nál, és az egyes szondázásoknál kibocsátott energia ne legyen kisebb, mint DE. Ha a radar által a célok követésére kiosztott átlagos teljesítmény egyenlő Rres-vel, akkor azon célpontok száma, amelyek egyidejűleg követhetik a radart,
ahol P cf - a radar teljes átlagos teljesítménye;
k<1 - коэффициент, определяющий долю общей мощности РЛС, выделяемой для сопровождения целей.
A (10) kifejezés az MPRL sávszélességének növelésének lehetőségét mutatja egy egypozíciós radarhoz képest. Nyilvánvaló, hogy a további átviteli pozíciók, amelyek növelik a P cp-t, növelik az áteresztőképességet. De még azonos P cf érték mellett is lényegesen nagyobb lehet az MPRLS átbocsátása, mint egy egypozíciós radaroké, hiszen a koordináták mérésének nagyobb pontossága (valamint a sebességvektor Doppler mérése) miatt Az egyes szondázásoknál a célpont értékének a T 3 intervallumot jelentősen meg lehet növelni. Az egyenes vonalhoz közeli repülési szakaszokon, amikor egy rakéta ballisztikus pályán repül, a koordináták egyedi méréseinek hibavarianciájának 2-3-szoros csökkenése megközelítőleg ugyanannyira növeli a T 3 szondák közötti megengedett intervallumot, és következésképpen az áteresztőképesség növekedése is 2-3-szoros kíséretében. A kooperatív vételnek és az ezzel járó energia- és pontossági jellemzők növekedésének köszönhetően az MPRLS egyéb funkciók (keresés, célfelismerés stb.) végrehajtásakor átviteli teljesítménynövekedést érhet el.
A "jel" információ mennyiségének növelése. A "jel" alatt az információ (a koordinátával ellentétben) általában a visszhangjelekben található információt a céltárgy geometriai, fizikai és egyéb jellemzőiről, valamint a saját tömegközéppontja körüli mozgásának jellemzőiről érti. A cél egyidejű, különböző irányokból történő megfigyelése miatt az MPRLS-ben a jelinformáció mennyisége jelentősen megnő az egypozíciós radarhoz képest.
Az elosztott pozíciók által vett jelek amplitúdójának, fázisának és polarizációjának mérésével pontosabban és rövidebb idő alatt lehet meghatározni a céltárgy saját forgásának méreteit, alakját, jellemzőit. A térben koherens MPRS-ben az antennarendszer kellően nagy apertúrájával (pozíciókészlettel) lehetőség nyílik a céltárgy kétdimenziós, sőt háromdimenziós rádióképének (RI) elkészítésére. Hosszú távú térbeli koherencia hiányában a briliáns pontokból érkező visszhangjelek fáziskülönbségeinek mérésével több nagy hatótávolságú portré is készíthető a célpontról különböző szögekből, valamint két- és háromdimenziós RI. a Doppler-frekvenciákkal feloldott cél.
Megnövelt védelem az aktív interferencia ellen. Az MRPLS-ben az egyállású radarok aktív interferencia elleni védekezésének minden módja használható, de vannak további lehetőségek is. Az egypozíciós radarok képesek elnyomni az antennamintázat oldalsó lebenyeiből származó interferenciát, de ha a minta fő lebenyei interferenciát okoznak, általában nem tudnak célpontokat észlelni. Ugyanakkor nem nehéz ilyen interferenciát létrehozni egy egypozíciós radarral, mivel a radar irányát annak sugárzása határozza meg. Ez lehetővé teszi „irányirányos” interferencia létrehozását. Az interferencia teljesítménysűrűsége tovább növelhető, ha „frekvencia-célzott” interferenciát alkalmazunk a radar hangjel frekvenciasávjában.
Sokkal nehezebb irányított interferenciát létrehozni egy bisztatikus radar számára, mivel az IAP-től a nem sugárzó vételi pozíció felé vezető irány gyakran ismeretlen. A bisztatikus radarok azonban általában nem képesek észlelni a célpontokat, ha interferenciának vannak kitéve a vevőantenna fő lebenyén.
Nagyon nehéz zavarást kelteni több, kellően elhelyezkedő MPRLS pozíció irányában egy időben. A széles szektorban stimulált kibocsátás csökkenti az egyes pozíciókra ható interferencia teljesítménysűrűségét.
A különböző frekvenciákon működő, több adási pozícióval rendelkező és a jelek széles frekvenciatartományban történő kooperatív vételével szemben a frekvencia-célzott interferencia sem hatékony. Az IAP teljesítményének kényszerű "elkenődése" a spektrumban az interferencia teljesítménysűrűségének további csökkenéséhez vezet a vizsgálójelek frekvenciasávjában.
A különböző típusú és frekvenciájú jeleket kibocsátó, egymástól elosztott adási pozíciók alkalmazása, valamint a vételi és adási pozíciók elválasztása (különösen kooperatív jelvétel esetén) megnehezíti az impulzus-válasz és imitációs interferencia létrehozását. Az ilyen interferencia hatékonysága tovább csökkenthető, ha a feldolgozás során különbségeket alkalmaznak a jelek érkezési idejében a célponttól és az IAP-től az elosztott vételi pozíciókhoz.
Az MPRLS pozícióinak megfelelő távolságával sokkal nehezebb interferenciát létrehozni az AP fő lebenyeiben egyidejűleg több pozícióba. Annak érdekében, hogy az IAP a fedett célponthoz való közelségét minden pozícióhoz viszonyítva szögkoordináták tekintetében biztosítsuk, mindhárom koordinátában kis távolságot kell tartani a cél és az IAP között (mozgásuk során).
Nagyon kis szögméretű "gyújtópont" jön létre egy térben koherens MPRLS-ben. Ez gyakorlatilag kizárja az IAP és a lefedett célpont egyidejű "fókuszpontjában" való hosszú tartózkodást, kivéve az önfedés eseteit, amikor az IAP a célpontra van telepítve.
Az MPRLS fontos jellemzője, hogy az egymástól távol eső pozíciók által vett jelek és interferencia összegeinek optimális együttes feldolgozásával a különböző pozíciókban kölcsönösen korreláló interferenciákat elnyomja, és hasznos jelet nyer ki. Ez elvileg lehetővé teszi a vevőantennák fő lebenyén interferencia által lefedett célpontok észlelését.
A passzív interferencia elleni védelem javítása. A pozíciók térbeli elkülönülése miatt az RP fő lebenyeinek metszésterületének térfogata az MPRLS adó- és vevőpozíciói sokkal kisebb lehet, mint a fő lebeny területének térfogata. az egyállású radar RP adó-vevője. Bizonyos körülmények között ez a vevők bemenetein a passzív interferencia intenzitásának jelentős csökkenéséhez vezet.
Azonban az olyan reflektorok által okozott interferencia csillapítása, amelyek az átviteli pozíció RP fő lebenyének és a vételi pozíció RP oldalsó lebenyeinek (vagy az RP oldallebenyeinek) metszésterületébe estek. adópozíciót és a fogadó pozíció RP főlebenyét) csak egy pozíció oldallebenyeinek szintje határozza meg. Ebből adódik az MPRL antenna iránymintázatának oldallebenyeinek szintjére vonatkozó szigorú követelmények.
Az elosztott adó- és vételi pozíciókkal rendelkező MPRLS-szel szemben az erős, irányított passzív interferencia forrásai, mint például a sarokreflektorok, hatástalanok. A térfogat-eloszlású célpontok – zavaró reflektorok csoportjai – által okozott interferencia általában nem korrelál egymással a különböző vételi pozíciókban. Ebben az esetben az aktív (térben korrelált) interferenciától eltérően a különböző pozíciók által vett passzív interferencia interpozíciós koherens kompenzációja lehetetlen. A jelek felhalmozódása miatt azonban a többpozíciós detektorok hatékonysága magasabb, mint az egypozíciós detektoroké.
Az egypozíciós radarokban használt összes mozgó célkiválasztás (MTS) módszer az MPRS-re is alkalmazható. Ugyanakkor az MPRLS nem rendelkezik az egyállású radarok bizonyos korlátaival. Például az SDC-módszerek egy egypozíciós radarban hatástalanok, ha a célpont "egy paraméter szerint" mozog a radarhoz képest, így a sugárirányú sebesség közel nulla. Ezt a hátrányt az MPRLS kiküszöböli, mivel a radiális sebesség nem lehet egyidejűleg több pozícióhoz képest nulla közelében. Az MPRLS-ben egy másik hátrányt is kiküszöbölnek hasonló módon - a "vak" sugárirányú sebességek jelenléte, mivel a célpont sugárirányú sebessége különbözik az egymástól elosztott pozíciókhoz képest. Ezen túlmenően, ha az MPRLS-ben több radarállomás (vagy adási pozíció) van, ezek eltérő hangimpulzus-ismétlési gyakorisággal rendelkezhetnek.
Az MPRLS-ben több lehetőség van a szondázási jelek típusának kiválasztására a passzív interferencia leküzdésére, mint az egypozíciós radar esetében. Különösen rövid impulzusismétlési periódusú koherens lökéseket lehet alkalmazni, azaz a sugárirányú sebesség egyediségének széles tartományában. Ha ebben az esetben kétértelműség adódik a tartományban, az kiküszöbölhető például háromszögelési módszerrel.
A túlélés növelése. Az űrben való diszperzió és a pozíciók túlzott száma jelentősen növeli az MPRLS túlélőképességét egy egypozíciós radarhoz képest, sőt több olyan radarhoz képest is, amelyeket nem egyesítenek az MPRLS-ben. Az egypozíciós és bisztatikus radaroktól eltérően az MPRL egy vagy akár több pozíciójának meghibásodása nem vezet teljes meghibásodáshoz, hanem csak bizonyos teljesítményromlást okoz. Ezt a fontos jellemzőt (a teljesítmény fokozatos csökkenése az MPRLS egyes összetevőinek meghibásodása esetén) a külföldi szakirodalom „kecses leépülésnek” nevezi. Meghibásodás előfordulhat külső hatások és a berendezés műszaki hibái miatt is, így a "kecses leromlás" nemcsak az MPRLS túlélőképességének, hanem megbízhatóságának növekedését is tükrözi. Ezt megkönnyíti az MPRLS konfiguráció megváltoztatásának lehetősége az egyes pozíciók meghibásodása esetén.
Az adó és a vevő pozíciók szétválasztása megnehezíti a nem kibocsátó vevő pozíciók helyzetének meghatározását (különösen mobil vagy gyorsan áthelyezett), ami szintén növeli azok túlélőképességét, beleértve a radarsugárzás által kiváltott antiradar lövedékeket is. . Az adóállások sebezhetőségének csökkentése érdekében számos intézkedés javasolt: az adóállások eltávolítása a veszélyzónából, például a határról vagy a frontvonalról, mobil hordozókra, különösen pilóta nélküli légi járművekre történő elhelyezése; az adóállások szabálytalan szekvenciális kikapcsolása túlzott számuk esetén („villogó” mód) stb.
Ezen túlmenően, az MPRLS-ben az információfeldolgozás decentralizálásával nő a túlélés.
kis hatótávolságú navigációs rádiórendszerek (RSBN) - hatótávolság akár 400-700 km, a repülőgép repülési magasságától függően (LA).
c) leszállórendszerek - információt adnak a repülőgép adott pályától való eltéréséről a repülés utolsó szakaszában.
2. Az autonómia foka
a) Az autonóm rendszerek és eszközök rádiókapcsolat nélkül mérnek, amely egy adott objektum fedélzeti berendezését a külső rádióelektronikai eszközökkel köti össze. Az információt a visszavert jelből nyerik ki.
b) A nem autonóm eszközök és rendszerek magukban foglalják mind a létesítményben telepített fedélzeti berendezéseket, mind a földi állomásokon rádiókapcsolattal hozzá kapcsolódó speciális rádióállomások berendezéseit, mesterséges földi műholdakat (AES) stb.
3. Mért elem típusa
a) goniometrikus eszközök - határozzák meg a szöget vízszintes (azimut) vagy függőleges (magassági) síkban, vagy az objektumhoz tartozó koordinátarendszerben. Rádiójeladókra és rádióiránykeresőkre oszthatók:
b) a rádiójeladók közé tartozik az elektromágneses teret létrehozó rádiójeladó, amelynek paraméterei a vételi pont szögkoordinátáitól függenek;
c) rádióirány-mérés (rádióirány-kereső) lehetővé teszi az elektromágneses rezgések sugárforrásának szögkoordinátáinak meghatározását a rádióhullámok érkezési irányának mérési eredményei alapján.
b) rádiós távolságmérők (rádiótávmérők) – az egyik tárgy és a másik közötti távolság mérésére szolgálnak.
Többpozíciós radarállomások (MPRLS)
Általános esetben az MPRL-ek a tér különböző pontjain (pozícióin) elhelyezett független, bistatikus és passzív radarokat kombinálják.
A független radarállomásokon (NRLS) a berendezés minden eleme egy ponton található, és egy ilyen rendszer alapja nulla.
Az alap a radarpozíciók közötti távolság.
Bjk - a pozíciók neve.
Ha Bjk = const, akkor az ilyen MPRLS-eket rögzített bázisú MPRLS-nek nevezzük. Az összes többi rendszer egy csoportot alkot mobil bázisokkal.
A radar térbeli távolsága esetén minden pozícióban vevőberendezések (passzív radar), vevő- és adóberendezések (passzív-aktív MPRLS) vagy NRS-berendezések (aktív MPRLS) helyezhetők el.
Az MPRLS általánosított szerkezete

Az MPRLS fő összetevői:
1. Berendezések egymástól távol P
2.POI - információfeldolgozási pont, ahol az egymástól távol eső helyekről érkező jeleket és információkat kombinálják és együtt dolgozzák fel.
3. Információátviteli csatornák.
4. Szinkronizációs csatornák.
Az MPRLS előnyei
1. Komplex térbeli betekintési területek kialakításának lehetősége.
2. Jobb energiafelhasználás a rendszerben.
3. A célpontok térbeli helyzetének pontosabb mérése.
4. Lehetőség a célpontok teljes sebességvektorának mérésére.
5. Zajtűrés javítása az aktív és passzív interferenciával kapcsolatban.
Az MPRLS hátrányai:
1) A rendszer bonyolultságának és költségének növelése.
2) A pozíciók munkájának szinkronizálásának szükségessége.
3) Az információfeldolgozás bonyolultsága a nagy mennyiség miatt.
A feldolgozás során megoldott feladatoktól függően az MPRLS elsődleges, másodlagos és harmadlagos feldolgozási típusokat különböztet meg.
Elsődleges feldolgozás abból áll, hogy észlel egy jelet a célpontból, és méri annak koordinátáit megfelelő minőségben és hibákkal.
Másodlagos feldolgozás biztosítja az egyes célpontok pályája paramétereinek meghatározását egy vagy több MPRLS pozíció jeleiből, beleértve a célpontok azonosításának műveletét is.
Harmadlagos feldolgozáshoz a különböző MPRLS vevők által vett céltárgyak pályájának paraméterei kombinálódnak, beleértve a működést is
Hitel